Cantitatea de mișcare a sistemului numiți suma geometrică a cantităților de mișcare ale tuturor punctelor materiale ale sistemului
Pentru clarificare simțul fizic(70) calculați derivata lui (64)
 .
(71)
.
(71)
Rezolvând (70) și (71) împreună, obținem
 .
(72)
.
(72)
În acest fel, vectorul moment al unui sistem mecanic este determinat de produsul dintre masa sistemului și viteza centrului său de masă.
Să calculăm derivata lui (72)
 .
(73)
.
(73)
Rezolvând (73) și (67) împreună, obținem
 .
(74)
.
(74)
Ecuația (74) exprimă următoarea teoremă.
Teorema: Derivata în timp a vectorului impuls al sistemului este egală cu suma geometrică a tuturor forțelor externe ale sistemului.
La rezolvarea problemelor, ecuația (74) trebuie proiectată pe axele de coordonate:
 .
(75)
.
(75)
Analiza (74) și (75) implică următoarele legea conservării impulsului sistemului: Dacă suma tuturor forțelor sistemului este egală cu zero, atunci vectorul său impuls își păstrează mărimea și direcția.
Dacă  , apoi
, apoi  ,Q
=
const
.
(76)
,Q
=
const
.
(76)
Într-un caz particular, această lege poate fi îndeplinită de-a lungul uneia dintre axele de coordonate.
Dacă  , apoi, Q z =
const.
(77)
, apoi, Q z =
const.
(77)
Este recomandabil să folosiți teorema schimbării impulsului în cazurile în care corpurile lichide și gazoase intră în sistem.
Teorema privind modificarea momentului unghiular al unui sistem mecanic
Cantitatea de mișcare caracterizează doar componenta de translație a mișcării. Pentru a caracteriza mișcarea de rotație a corpului, conceptul de moment principal al cantităților de mișcare ale sistemului în raport cu acest centru(moment cinetic).
Elanul sistemului despre acest centru se numește suma geometrică momente ale momentelor tuturor punctelor sale despre același centru
 .
(78)
.
(78)
Proiectând (22) pe axele de coordonate, se poate obține expresia momentului unghiular în raport cu axele de coordonate
 .
(79)
.
(79)
Momentul unghiular al corpului în jurul axelor este egal cu produsul momentului de inerție al corpului în jurul acestei axe cu viteza unghiulară a corpului
 .
(80)
.
(80)
Din (80) rezultă că momentul cinetic caracterizează doar componenta de rotație a mișcării.
O caracteristică a acțiunii de rotație a unei forțe este momentul acesteia față de axa de rotație.
Teorema schimbării impulsului stabilește relația dintre caracteristica mișcării de rotație și forța care provoacă această mișcare.
Teorema: Derivata în timp a vectorului moment unghiular al sistemului în raport cu un centru este egală cu suma geometrică a momentelor tuturor forțelor externe ale sistemului în raport cuacelasi centru
 .
(81)
.
(81)
La rezolvarea problemelor de inginerie (81), este necesar să se proiecteze pe axele de coordonate
Analiza lor (81) și (82) implică legea conservării impulsului: Dacă suma momentelor tuturor forțelor externe în jurul centrului (sau axei) este egală cu zero, atunci momentul cinetic al sistemului în jurul acestui centru (sau axă) își păstrează mărimea și direcția.
 ,
,
sau 
Momentul unghiular nu poate fi modificat prin acțiunea forțelor interne ale sistemului, dar datorită acestor forțe este posibilă modificarea momentului de inerție și, prin urmare, a vitezei unghiulare.
Lăsați punctul material să se miște sub acțiunea forței F. Este necesar să se determine mișcarea acestui punct în raport cu sistemul în mișcare Oxyz(cm. miscare complexa punct material), care se deplasează într-un mod cunoscut în raport cu un sistem fix O 1 X 1 y 1 z 1 .
Ecuația de bază a dinamicii într-un sistem staționar
Scriem accelerația absolută a unui punct conform teoremei Coriolis
Unde A abs– accelerație absolută;
A rel– accelerație relativă;
A bandă– accelerație portabilă;
A miez este accelerația Coriolis.
Să rescriem (25) ținând cont de (26)
Să introducem notația  - forța de inerție portabilă,
- forța de inerție portabilă,  este forța de inerție Coriolis. Atunci ecuația (27) ia forma
este forța de inerție Coriolis. Atunci ecuația (27) ia forma
Ecuația de bază a dinamicii de studiat mișcare relativă(28) se scrie la fel ca pentru mișcarea absolută, la forțele care acționează asupra punctului trebuie adăugate doar forțele de translație și Coriolis de inerție.
Teoreme generale ale dinamicii punctelor materiale
Când rezolvați multe probleme, puteți utiliza spații prefabricate obținute pe baza celei de-a doua legi a lui Newton. Astfel de metode de rezolvare a problemelor sunt combinate în această secțiune.
Teorema privind modificarea impulsului unui punct material
Să introducem următoarele caracteristici dinamice:
1. Cantitatea de mișcare a unui punct material este o mărime vectorială egală cu produsul dintre masa unui punct și vectorul vitezei acestuia

 .
(29)
.
(29)
2. Impulsul de forta
Impulsul de forță elementară- o mărime vectorială egală cu produsul vectorului forță cu un interval de timp elementar

 (30).
(30).
Apoi impuls deplin
 .
(31)
.
(31)
La F=const obținem S=ft.
Impulsul total pe o perioadă finită de timp poate fi calculat doar în două cazuri, când forța care acționează asupra punctului este constantă sau depinde de timp. În alte cazuri, este necesar să se exprime forța în funcție de timp.
Egalitatea dimensiunilor impulsului (29) și impulsului (30) face posibilă stabilirea unei relații cantitative între ele.
Luați în considerare mișcarea unui punct material M sub acțiune forță arbitrară F pe o cale arbitrară.
DESPRE  UD:
UD:  .
(32)
.
(32)
Separăm variabilele în (32) și integrăm
 .
(33)
.
(33)
Ca urmare, ținând cont de (31), obținem
 .
(34)
.
(34)
Ecuația (34) exprimă următoarea teoremă.
Teorema: Modificarea impulsului unui punct material într-o anumită perioadă de timp este egală cu impulsul forței care acționează asupra punctului în același interval de timp.
La rezolvarea problemelor, ecuația (34) trebuie proiectată pe axele de coordonate
Această teoremă este convenabilă de utilizat atunci când mărimile date și necunoscute includ masa unui punct, viteza sa inițială și finală, forțele și timpul de mișcare.
Teorema privind modificarea momentului unghiular al unui punct material
M  momentul impulsului unui punct material relativ la centru este egal cu produsul dintre modulul de impuls al punctului și al brațului, i.e. cea mai scurtă distanță (perpendiculară) de la centru la o linie care coincide cu vector viteză
momentul impulsului unui punct material relativ la centru este egal cu produsul dintre modulul de impuls al punctului și al brațului, i.e. cea mai scurtă distanță (perpendiculară) de la centru la o linie care coincide cu vector viteză
 ,
(36)
,
(36)
 .
(37)
.
(37)
Relația dintre momentul forței (cauză) și momentul impulsului (efectul) se stabilește prin următoarea teoremă.
Fie punctul M de masă dată m deplasându-se sub influența forței F.

 ,
,
 ,
,
 ,
(38)
,
(38)
 .
(39)
.
(39)
Să calculăm derivata lui (39)
 .
(40)
.
(40)
Combinând (40) și (38), obținem în final
 .
(41)
.
(41)
Ecuația (41) exprimă următoarea teoremă.
Teorema: Derivata în timp a vectorului moment unghiular al unui punct material relativ la un centru este egală cu momentul forței care acționează asupra punctului relativ la același centru.
La rezolvarea problemelor, ecuația (41) trebuie proiectată pe axele de coordonate
În ecuațiile (42), momentele impulsului și forței sunt calculate în raport cu axele de coordonate.
Din (41) rezultă legea conservării momentului unghiular (legea lui Kepler).
Dacă momentul forței care acționează asupra unui punct material în raport cu orice centru este egal cu zero, atunci momentul unghiular al punctului în raport cu acest centru își păstrează mărimea și direcția.
Dacă  , apoi
, apoi  .
.
Teorema și legea conservării sunt utilizate în problemele pe mișcare curbilinie, mai ales sub acţiunea forţelor centrale.
Numărul de mișcări după măsură mișcare mecanică, dacă mișcarea mecanică se transformă într-una mecanică. De exemplu, mișcarea mecanică a unei mingi de biliard (Fig. 22) înainte de impact trece în mișcarea mecanică a bilelor după impact. Pentru un punct, impulsul este egal cu produsul.
Măsura acțiunii forței în acest caz este impulsul forței
 .
(9.1)
.
(9.1)
Momentul determină acțiunea forței  pentru o perioada de timp
pentru o perioada de timp  . Pentru un punct material, teorema schimbării impulsului poate fi utilizată sub formă diferențială
. Pentru un punct material, teorema schimbării impulsului poate fi utilizată sub formă diferențială  (9.2) sau formă integrală (finită).
(9.2) sau formă integrală (finită).  .
(9.3)
.
(9.3)
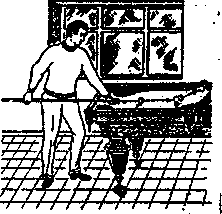
Modificarea impulsului unui punct material într-o anumită perioadă de timp este egală cu impulsul tuturor forțelor aplicate punctului în același timp.
Figura 22
La rezolvarea problemelor, teorema (9.3) este folosită mai des în proiecțiile pe axele de coordonate  ;
;
 ;
(9.4)
;
(9.4)
 .
.
Folosind teorema privind modificarea impulsului unui punct, este posibil să se rezolve probleme în care un punct sau un corp care se mișcă translațional este supus unor forțe constante sau variabile care depind de timp și de numărul de valori date și căutate. include timpul de mișcare și viteza la începutul și sfârșitul mișcării. Problemele folosind teorema sunt rezolvate în următoarea succesiune:
1. alege un sistem de coordonate;
2. descrieți toate forțele și reacțiile date (active) care acționează asupra unui punct;
3. scrieți teorema privind modificarea impulsului unui punct în proiecții pe axele de coordonate selectate;
4. determinați valorile dorite.
EXEMPLUL 12.
Un ciocan care cântărește G=2t cade de la o înălțime h=1m pe o piesa de prelucrat într-un timp t=0,01s și ștampilează piesa (Fig. 23). Determinați forța medie a ciocanului asupra piesei de prelucrat.

SOLUŢIE.
1. Gravitația ciocanului acționează asupra piesei de prelucrat  și susține reacția
și susține reacția  . Valoare susține reacția se modifică în timp, deci luați în considerare valoarea medie
. Valoare susține reacția se modifică în timp, deci luați în considerare valoarea medie  .
.
2. direcționați axa de coordonate y vertical în jos și aplicați teorema privind modificarea impulsului unui punct în proiecție pe această axă:  , (1) unde
, (1) unde  - viteza ciocanului la finalul loviturii;
- viteza ciocanului la finalul loviturii;
 - viteza initiala a ciocanului in momentul contactului cu piesa de prelucrat.
- viteza initiala a ciocanului in momentul contactului cu piesa de prelucrat.
3. Pentru a determina viteza  Compune ecuație diferențială mișcarea ciocanului în proiecție pe axa y:
Compune ecuație diferențială mișcarea ciocanului în proiecție pe axa y:
 .
(2)
.
(2)
Separați variabilele, integrați ecuația (2) de două ori:  ;
;
 ;
;
 . Constantele de integrare C 1 , C 2 găsim din condiții inițiale. La t=0 V y =0, atunci C 1 =0; y \u003d 0, apoi C 2 \u003d 0. Prin urmare, ciocanul se mișcă conform legii
. Constantele de integrare C 1 , C 2 găsim din condiții inițiale. La t=0 V y =0, atunci C 1 =0; y \u003d 0, apoi C 2 \u003d 0. Prin urmare, ciocanul se mișcă conform legii  , (3) iar viteza ciocanului se modifica conform legii
, (3) iar viteza ciocanului se modifica conform legii  . (4) Vom exprima timpul de mișcare a ciocanului de la (3) și vom înlocui în (4)
. (4) Vom exprima timpul de mișcare a ciocanului de la (3) și vom înlocui în (4)  ;
; .
(5)
.
(5)
4. Găsim proiecția impulsului forțelor externe pe axa y prin formula:  . (6) Înlocuiți (5) și (6) în (1):
. (6) Înlocuiți (5) și (6) în (1):  , de unde găsim reacția suportului, și, în consecință, presiunea dorită a ciocanului asupra piesei de prelucrat
, de unde găsim reacția suportului, și, în consecință, presiunea dorită a ciocanului asupra piesei de prelucrat  T.
T.

Figura 24
LAunde M este masa sistemului, V c este viteza centrul de greutate. Teorema privind modificarea impulsului unui sistem mecanic poate fi scrisă sub formă diferențială și finită (integrală):  ;
;
 .
(9.7)
.
(9.7)
 . (9.5) Cantitatea de mișcare a unui sistem sau a unui corp rigid poate fi determinată cunoscând masa sistemului și viteza centrului de masă
. (9.5) Cantitatea de mișcare a unui sistem sau a unui corp rigid poate fi determinată cunoscând masa sistemului și viteza centrului de masă  ,
(9.6)
,
(9.6)Modificarea cantității de mișcare a unui sistem mecanic într-o anumită perioadă de timp este egală cu suma impulsurilor forțelor externe care acționează în același timp. Uneori este mai convenabil să folosiți teorema privind modificarea impulsului în proiecția pe axele de coordonate  ;
(9.8)
;
(9.8) .
(9.9)
.
(9.9)
Legea conservării impulsului stabilește că, în absența forțelor externe, impulsul unui sistem mecanic rămâne constant. Acțiunea forțelor interne nu poate schimba impulsul sistemului. Ecuația (9.6) arată că pentru  ,
, .
.
Dacă  , apoi
, apoi  sau
sau  .
.
D
elice sau elice propulsie cu reacție. Calamarii se deplasează în smucitură, aruncând apă din sacul muscular după principiul unui tun cu apă (Fig. 25). Apa respinsă are o cantitate cunoscută de mișcare înapoi. Calamarul câștigă viteza corespunzătoare  mișcarea înainte datorită împingerii reactive
mișcarea înainte datorită împingerii reactive  , pentru că înainte ca calmarul să sară afară, forța
, pentru că înainte ca calmarul să sară afară, forța  echilibrat de gravitaţie
echilibrat de gravitaţie  .
.
Aplicarea teoremei schimbării impulsului face posibilă excluderea tuturor din considerente forțe interne.
EXEMPLUL 13.
Pe o platformă de cale ferată, de sine stătătoare pe șine, este instalat un troliu A cu un tambur cu raza r (Fig. 26). Troliul este proiectat să se deplaseze pe platforma încărcăturii B cu masa m 1 . Greutatea platformei cu troliu m 2 . Tamburul troliului se rotește conform legii  . La momentul inițial, sistemul era mobil. Neglijând frecarea, găsiți legea schimbării vitezei platformei după pornirea troliului.
. La momentul inițial, sistemul era mobil. Neglijând frecarea, găsiți legea schimbării vitezei platformei după pornirea troliului.
R  DECIZIE.
DECIZIE.
1. Considerați platforma, troliul și încărcătura ca fiind unice sistem mecanic, care este afectat forțe externe: gravitatea sarcinii  și platforme
și platforme  și reacții
și reacții  Și
Și  .
.
2. Deoarece toate forțele externe sunt perpendiculare pe axa x, adică.  , aplicăm legea conservării impulsului unui sistem mecanic în proiecție pe axa x:
, aplicăm legea conservării impulsului unui sistem mecanic în proiecție pe axa x:  . La momentul inițial de timp, sistemul era staționar, prin urmare,
. La momentul inițial de timp, sistemul era staționar, prin urmare, 
Să exprimăm cantitatea de mișcare a sistemului la un moment arbitrar în timp. Platforma se deplasează înainte cu o viteză  , sarcina realizează o mișcare complexă, constând într-o mișcare relativă de-a lungul platformei cu o viteză
, sarcina realizează o mișcare complexă, constând într-o mișcare relativă de-a lungul platformei cu o viteză  Și mișcare portabilăîmpreună cu platforma cu viteza
Și mișcare portabilăîmpreună cu platforma cu viteza  ., Unde
., Unde  . Platforma se va deplasa în direcția opusă mișcării relative a încărcăturii.
. Platforma se va deplasa în direcția opusă mișcării relative a încărcăturii.
EXEMPLUL 14.

SOLUŢIE.
1. Aplicați teorema privind modificarea impulsului unui sistem mecanic în proiecție pe axa x. Deoarece toate forțele externe care acționează asupra sistemului sunt verticale, atunci  , apoi
, apoi  , Unde
, Unde  .
(1)
.
(1)
2. Exprimăm proiecția cantității de mișcare pe axa x pentru sistemul mecanic considerat  ,
,
 t 2) (S-in metri, t-in secunde), (Fig. 26). Determinați viteza plăcii la momentul t 1 =1s, folosind teorema privind modificarea impulsului sistemului mecanic.
t 2) (S-in metri, t-in secunde), (Fig. 26). Determinați viteza plăcii la momentul t 1 =1s, folosind teorema privind modificarea impulsului sistemului mecanic.Unde  ,
, -- cantitatea de mișcare a plăcii și respectiv a încărcăturii.
-- cantitatea de mișcare a plăcii și respectiv a încărcăturii. 

 ;
;
 , Unde
, Unde  --viteza absolută a sarciniiD. Din egalitatea (1) rezultă că K 1x + K 2x \u003d C 1 sau m 1 u x + m 2 V Dx \u003d C 1. (2) Pentru a determina V Dx, considerăm mișcarea sarcinii D ca fiind complexă, considerând mișcarea ei față de placă ca fiind relativă, iar mișcarea plăcii în sine ca fiind portabilă, atunci
--viteza absolută a sarciniiD. Din egalitatea (1) rezultă că K 1x + K 2x \u003d C 1 sau m 1 u x + m 2 V Dx \u003d C 1. (2) Pentru a determina V Dx, considerăm mișcarea sarcinii D ca fiind complexă, considerând mișcarea ei față de placă ca fiind relativă, iar mișcarea plăcii în sine ca fiind portabilă, atunci 
 ,
(3)
,
(3)
 ; sau în proiecția pe axa x:
; sau în proiecția pe axa x: 
 . (4) Înlocuiți (4) în (2):
. (4) Înlocuiți (4) în (2): 
 . (5) Constanta de integrare C 1 se determină din condiţiile iniţiale: la t=0 u=u 0 ; (m 1 +m 2)u 0 \u003d C 1. (6) Înlocuind valoarea constantei C 1 în ecuația (5), obținem
. (5) Constanta de integrare C 1 se determină din condiţiile iniţiale: la t=0 u=u 0 ; (m 1 +m 2)u 0 \u003d C 1. (6) Înlocuind valoarea constantei C 1 în ecuația (5), obținem 
 Domnișoară.
Domnișoară.
Luați în considerare un sistem format din puncte materiale. Să compunem ecuații diferențiale de mișcare (13) pentru acest sistem și să le adăugăm termen cu termen. Apoi primim
Ultima sumă după proprietatea forțelor interne este egală cu zero. In afara de asta,
![]()
In sfarsit gasim
![]()
Ecuația (20) exprimă teorema privind modificarea impulsului sistemului în formă diferențială: derivata în timp a impulsului sistemului este egală cu suma geometrică a tuturor forțelor externe care acționează asupra sistemului. În proiecțiile pe axele de coordonate va fi:
Să găsim o altă expresie a teoremei. Fie în momentul de timp impulsul sistemului este egal cu și în momentul devine egal cu . Apoi, înmulțind ambele părți ale egalității (20) cu și integrând, obținem

![]()
întrucât integralele din dreapta dau impulsurile forţelor externe.
Ecuația (21) exprimă teorema privind modificarea impulsului sistemului în formă integrală: modificarea impulsului sistemului într-o anumită perioadă de timp este egală cu suma impulsurilor care acționează asupra sistemului de forțe externe peste aceeași perioadă de timp.
În proiecțiile pe axele de coordonate va fi:
Să subliniem legătura dintre teorema demonstrată și teorema asupra mișcării centrului de masă. Din moment ce , atunci, înlocuind această valoare în egalitatea (20) și ținând cont că obținem , adică ecuația (16).
Prin urmare, teorema privind mișcarea centrului de masă și teorema privind modificarea impulsului sistemului sunt, în esență, două forme diferite aceeași teoremă. În cazurile în care se studiază mișcarea unui corp rigid (sau a unui sistem de corpuri), oricare dintre aceste forme poate fi utilizată în mod egal, iar ecuația (16) este de obicei mai convenabil de utilizat. Pentru un mediu continuu (lichid, gaz), atunci când rezolvă probleme, se utilizează de obicei teorema privind modificarea impulsului sistemului. Această teoremă are aplicații importante și în teoria impactului (vezi cap. XXXI) și în studiul propulsiei cu reacție (vezi § 114).
Cantitatea de mișcare a unui punct material se numește mărime vectorială mv, egal cu produsul dintre masa punctului și vectorul vitezei acestuia. Vector mV atașat la un punct în mișcare.
Cantitatea de mișcare a sistemului se numește mărime vectorială Q, egal cu suma geometrică (vectorul principal) a impulsului tuturor punctelor sistemului:
Vector Q este un vector liber. În sistemul SI de unități, modulul de impuls este măsurat în kg m/s sau N s.
De regulă, vitezele tuturor punctelor sistemului sunt diferite (a se vedea, de exemplu, distribuția vitezelor punctelor unei roți de rulare prezentată în Fig. 6.21) și, prin urmare, însumarea directă a vectorilor din partea dreaptă de egalitate (17.2) este dificil. Să găsim o formulă cu ajutorul căreia cantitatea Q mult mai usor de calculat. Din egalitate (16.4) rezultă că
Luând derivata în timp a ambelor părți, obținem
![]() Prin urmare, luând în considerare egalitatea (17.2), constatăm că
Prin urmare, luând în considerare egalitatea (17.2), constatăm că
adică, cantitatea de mișcare a sistemului este egală cu produsul dintre masa întregului sistem și viteza centrului său de masă.
Rețineți că vectorul Q, ca vectorul principal al forțelor în statică, este un vector generalizat caracteristic mișcării întregului sistem mecanic. În cazul general al mișcării unui sistem, impulsul acestuia este Q poate fi considerată ca o caracteristică a părții de translație a mișcării sistemului împreună cu centrul său de masă. Dacă în timpul mișcării sistemului (corpului) centrul de masă este staționar, atunci impulsul sistemului va fi egal cu zero. Acesta este, de exemplu, impulsul unui corp care se rotește în jurul unei axe fixe care trece prin centrul său de masă.
Exemplu. Determinați cantitatea de mișcare a sistemului mecanic (Fig. 17.1, dar), constând din marfă DAR greutate t A - 2 kg, bloc omogen ÎN cântărind 1 kg și roți D greutate mD-4 kg. Marfă DAR deplasându-se cu o viteză V A - 2 m/s, roată D se ruleaza fara alunecare, firul este inextensibil si fara greutate. Soluţie. Cantitatea de mișcare a sistemului corpului
Corp DAR mergând înainte și Q A \u003d m A V A(numeric QA= 4 kg m/s, direcție vectorială QA coincide cu directia VA). bloc ÎN comite mișcare de rotațieîn jurul unei axe fixe care trece prin centrul său de masă; Prin urmare, QB- 0. Roata D face un plan-paralel

mişcare; centrul său instantaneu de viteze este în punctul respectiv LA, deci viteza centrului său de masă (puncte E) este egal cu V E = V A /2= 1 m/s. Numărul de mișcări ale roții Q D - m D V E - 4 kg m/s; vector Q Dîndreptată orizontal spre stânga.
Reprezentând vectori QAȘi Q Dîn fig. 17.1, b, găsiți impulsul Q sisteme conform formulei (a). Ținând cont de direcțiile și valorile numerice ale cantităților, obținem Q ~^Q A +Q E=4l/2~kg m/s, directie vectoriala Q prezentată în fig. 17.1, b.
Dat fiind a-dV/dt, ecuația (13.4) a legii de bază a dinamicii poate fi reprezentată ca
Ecuația (17.4) exprimă teorema privind modificarea impulsului unui punct în formă diferențială: în fiecare moment de timp, derivata în timp a impulsului unui punct este egală cu forța care acționează asupra punctului. (În esență, aceasta este o altă formulare a legii de bază a dinamicii, apropiată de cea dată de Newton.) Dacă asupra unui punct acționează mai multe forțe, atunci în partea dreaptă a egalității (17.4) va exista o rezultantă a forțelor. aplicat punctului material.
Dacă ambele părți ale ecuației sunt înmulțite cu dt, atunci primim
Valoarea vectorială din partea dreaptă a acestei egalități caracterizează acțiunea exercitată asupra corpului prin forță într-o perioadă elementară de timp dt se notează această valoare dS si suna impuls elementar de forță, adică
Puls S putere F pe un interval de timp finit /, - / 0 este definit ca limita sumei integrale a impulsurilor elementare corespondente, i.e.

Într-un caz particular, dacă forța F constantă în modul și în direcție, atunci S = F(t| -/0) și S- F(t l -/ 0). În cazul general, modulul impulsului de forță poate fi calculat din proiecțiile sale pe axele de coordonate:

Acum, integrând ambele părți ale egalității (17.5) cu T= const, obținem
Ecuația (17.9) exprimă teorema privind modificarea impulsului unui punct în formă finită (integrală): modificarea impulsului unui punct într-o anumită perioadă de timp este egală cu impulsul forței care acționează asupra punctului (sau impulsul rezultantei tuturor forțelor aplicate acestuia) pentru aceeași perioadă de timp.
La rezolvarea problemelor, ecuațiile acestei teoreme sunt folosite în proiecții pe axele de coordonate

Acum luați în considerare un sistem mecanic format din P puncte materiale. Apoi, pentru fiecare punct, putem aplica teorema schimbării impulsului în forma (17.4), ținând cont de forțele externe și interne aplicate punctelor:

Însumând aceste egalități și ținând cont de faptul că suma derivatelor este egală cu derivata sumei, obținem

Deoarece prin proprietatea forţelor interne H.F.k=0 și prin definiția impulsului ^fn k V/ c = Q, apoi găsim în sfârșit

Ecuația (17.11) exprimă teorema privind modificarea impulsului sistemului în formă diferențială: în fiecare moment de timp, derivata în timp a impulsului sistemului este egală cu suma geometrică a tuturor forțelor externe care acționează asupra sistemului.
Proiectând egalitatea (17.11) pe axele de coordonate, obținem
Înmulțirea ambelor părți ale (17.11) cu dtși integrând, obținem
unde 0, Q0 - cantitatea de mișcare a sistemului în anumite momente și respectiv / 0 .
Ecuația (17.13) exprimă teorema privind modificarea impulsului sistemului în formă integrală: modificarea impulsului sistemului în orice moment este egală cu suma impulsurilor tuturor forțelor externe care acționează asupra sistemului în același timp.
În proiecțiile pe axele de coordonate, obținem
Din teorema privind modificarea impulsului sistemului se pot obține următoarele consecințe importante, care exprimă legea conservării impulsului sistemului.
- 1. Dacă suma geometrică a tuturor forțelor externe care acționează asupra sistemului este egală cu zero (LF k=0), apoi din ecuația (17.11) rezultă că în acest caz Q= const, adică vectorul impuls al sistemului va fi constant în mărime și direcție.
- 2. Dacă forțele externe care acționează asupra sistemului sunt astfel încât suma proiecțiilor lor pe orice axă este zero (de exemplu, I e kx = 0), apoi din ecuațiile (17.12) rezultă că în acest caz Q x = const, adică proiecția impulsului sistemului pe această axă rămâne neschimbată.
Rețineți că forțele interne ale sistemului nu participă la ecuația teoremei privind modificarea impulsului sistemului. Aceste forțe, deși afectează impulsul punctelor individuale ale sistemului, nu pot schimba impulsul sistemului în ansamblu. Având în vedere această împrejurare, la rezolvarea problemelor, este oportun să alegeți sistemul luat în considerare astfel încât forțele necunoscute (toate sau parțial) să fie interne.
Legea conservării impulsului este convenabil de aplicat în cazurile în care modificarea vitezei unei părți a sistemului este necesară pentru a determina viteza altei părți a acestuia.
Problema 17.1. LA cântărire cărucior t x- 12 kg deplasându-se pe un plan orizontal neted, într-un punct DAR o tijă fără greutate este atașată cu ajutorul unei balamale cilindrice ANUNȚ lungime /= 0,6 m cu sarcina D greutate t 2 - 6 kg la capăt (Fig. 17.2). La timp / 0 = 0, când viteza căruciorului Și () - 0,5 m/s, tijă ANUNȚîncepe să se rotească în jurul axei DAR, perpendicular pe planul desenului, conform legii φ \u003d (tg / 6) (3 ^ 2 - 1) rad (/- în secunde). Defini: u=f.
§ 17.3. Teorema asupra mișcării centrului de masă
Teorema privind modificarea impulsului unui sistem mecanic poate fi exprimată într-o altă formă, care se numește teorema asupra mișcării centrului de masă.
Substituind în ecuația (17.11) egalitatea Q=MV C , primim
![]()
Daca masa M sistemul este constant, obținem
Unde si cu - accelerarea centrului de masă al sistemului.
Ecuația (17.15) exprimă teorema privind mișcarea centrului de masă al sistemului: produsul dintre masa sistemului și accelerația centrului său de masă este egal cu suma geometrică a tuturor forțelor externe care acționează asupra sistemului.
Proiectând egalitatea (17.15) pe axele de coordonate, obținem
Unde x c , y c , z c - coordonatele centrului de masă al sistemului.
Aceste ecuații sunt ecuații diferențiale ale mișcării centrului de masă în proiecții pe axă Sistemul cartezian coordonatele.
Să discutăm rezultatele. Să ne amintim preliminar că centrul de masă al sistemului este un punct geometric, uneori situat în afara limitelor geometrice ale corpului. Forțele care acționează asupra sistemului mecanic (exterior și intern) sunt aplicate tuturor punctelor materiale ale sistemului. Ecuațiile (17.15) fac posibilă determinarea mișcării centrului de masă al sistemului fără a determina mișcarea punctelor sale individuale. Comparând ecuațiile (17.15) ale teoremei privind mișcarea centrului de masă și ecuația (13.5) a celei de-a doua legi a lui Newton pentru un punct material, ajungem la concluzia: centrul de masă al unui sistem mecanic se mișcă ca punct material, a cărui masă este egală cu masa întregului sistem și ca și cum toate forțele externe care acționează asupra sistemului ar fi aplicate în acest punct. Astfel, soluţiile pe care le obţinem luând în considerare corp dat ca punct material, determinați legea de mișcare a centrului de masă al acestui corp.
În special, dacă corpul se mișcă înainte, atunci caracteristicile cinematice ale tuturor punctelor corpului și centrul său de masă sunt aceleași. De aceea un corp care se mișcă progresiv poate fi întotdeauna considerat un punct material cu o masă, egal cu masa a întregului corp.
După cum se poate observa din (17.15), forțele interne care acționează asupra punctelor sistemului nu afectează mișcarea centrului de masă al sistemului. Forțele interne pot influența mișcarea centrului de masă în acele cazuri când forțele externe se modifică sub influența lor. Exemple în acest sens vor fi date mai jos.
Din teorema privind mișcarea centrului de masă se pot obține următoarele consecințe importante, care exprimă legea conservării mișcării centrului de masă al sistemului.
1. Dacă suma geometrică a tuturor forțelor externe care acționează asupra sistemului este zero (LF k=0), atunci rezultă din ecuația (17.15),
ce ziceti a c = 0 sau V c = const, adică centrul de masă al acestui sistem
se deplasează cu o viteză constantă în mărime și direcție (în caz contrar, uniform și rectiliniu). Într-un caz special, dacă la început centrul de masă era în repaus ( Vc=0), atunci va rămâne în repaus; Unde
urmări prezice că poziția sa în spațiu nu se va schimba, adică rc = const.
2. Dacă forțele exterioare care acționează asupra sistemului sunt astfel încât suma proiecțiilor lor pe o anumită axă (de exemplu, axa X) zero (?F e kx= 0), apoi din ecuația (17.16) rezultă că în acest caz x s=0 sau V Cx \u003d x c \u003d const, adică proiecția vitezei centrului de masă al sistemului pe această axă este o valoare constantă. Într-un caz special, dacă în momentul inițial Vex= 0, atunci în orice moment ulterior această valoare va fi păstrată și, prin urmare, rezultă că coordonatele x s centrul de masă al sistemului nu se va schimba, adică x s - const.
Luați în considerare exemple care ilustrează legea mișcării centrului de masă.
Exemple. 1. După cum sa menționat, mișcarea centrului de masă depinde numai de forțele externe, forțele interne nu pot schimba poziția centrului de masă. Dar forțele interne ale sistemului pot provoca influențe externe. Deci, mișcarea unei persoane pe o suprafață orizontală are loc sub acțiunea forțelor de frecare dintre tălpile pantofilor și suprafața drumului. Cu puterea mușchilor săi (forțe interne), o persoană împinge de pe suprafața drumului cu picioarele, ceea ce provoacă o forță de frecare (externă pentru o persoană) în punctele de contact cu drumul, îndreptată în direcția mișcării sale.
- 2. Mașina se mișcă în același mod. Forțele interne de presiune din motorul său fac roțile să se rotească, dar, deoarece acestea din urmă au tracțiune, forțele de frecare care apar „împing” mașina înainte (ca urmare, roțile nu se rotesc, ci se mișcă într-un mod plan-paralel) . Dacă drumul este absolut neted, atunci centrul de masă al mașinii va fi staționar (la viteza inițială zero), iar roțile, în absența frecării, vor aluneca, adică se vor roti.
- 3. Mișcarea cu ajutorul elicei, elicei, vâslelor se produce din cauza respingerii unei anumite mase de aer (sau apă). Dacă considerăm masa aruncată și corpul în mișcare ca un sistem, atunci forțele de interacțiune dintre ele, ca interne, nu pot schimba impulsul total al acestui sistem. Cu toate acestea, fiecare dintre părțile acestui sistem va deplasa, de exemplu, barca înainte și apa pe care vâslele o aruncă înapoi.
- 4. În spațiul fără aer, când racheta se mișcă, „masa aruncată” ar trebui „luată cu tine”: motorul cu reacție informează racheta despre mișcare, aruncând înapoi produsele de combustie ale combustibilului cu care este umplută racheta.
- 5. Când coborâți cu o parașută, puteți controla mișcarea centrului de masă al sistemului om-parașuta. Dacă, printr-un efort muscular, o persoană trage liniile parașutei în așa fel încât forma copertinei sale sau unghiul de atac al fluxului de aer se schimbă, atunci aceasta va provoca o modificare a influenței externe a fluxului de aer și, prin urmare, va afecta mișcarea întregului sistem.
Problema 17.2. ÎN sarcina 17.1 (vezi Figura 17.2) determinați: 1) legea de mișcare a căruciorului X (= /)(/), dacă se știe că la momentul inițial al timpului t 0 = Despre sistemul era în repaus și coordonata x 10 = 0; 2) legea modificării cu timpul a valorii totale a reacției normale N(N = N" + N") plan orizontal, adică N=f2 (t).
Soluţie. Aici, ca și în problema 17.1, considerăm un sistem format dintr-un cărucior și o sarcină D,într-o poziţie arbitrară sub acţiunea forţelor externe aplicate acestuia (vezi Fig. 17.2). Axele de coordonate Ohu trageți astfel încât axa x să fie orizontală și axa x la trecut prin punct A 0 , adică locația punctului DAR atunci t-t 0 - 0.
1. Determinarea legii de mișcare a căruciorului. Pentru a determina x, = /, (0, folosim teorema privind mișcarea centrului de masă al sistemului. Să compunem o ecuație diferențială a mișcării sale în proiecție pe axa x:
![]()
Deoarece toate forțele externe sunt verticale, atunci T, F e kx = 0 și, prin urmare
Integrând această ecuație, constatăm că Mx c \u003d B, adică proiecția vitezei centrului de masă al sistemului pe axa x este o valoare constantă. Din moment ce în momentul inițial al timpului
Integrarea ecuației Mx s= 0, obținem
adică coordonate x s centrul de masă al sistemului este constant.
Să scriem expresia Mx s pentru o poziție arbitrară a sistemului (vezi Fig. 17.2), ținând cont de faptul că x A - x { , x D - x 2Și x 2 - x ( - eu păcat f. În conformitate cu formula (16.5), care determină coordonatele centrului de masă al sistemului, în acest caz Mx s - t(x( + t 2 x 2".
pentru un moment arbitrar
pentru punctul de timp / () = 0, X (= 0 și
În conformitate cu egalitatea (b), coordonatele x s centrul de masă al întregului sistem rămâne neschimbat, adică x c (t). Prin urmare, prin echivalarea expresiilor (c) și (d), obținem dependența coordonatei x de timp.
Răspuns: X - 0,2 m, unde t-în secunde.
2. Definirea reactiei N. Pentru determinare N=f2 (t) compunem ecuația diferențială de mișcare a centrului de masă al sistemului în proiecție pe axa verticală la(vezi fig. 17.2):
Prin urmare, denotând N=N+N", primim
După formula care determină ordonata tu s centrul de masă al sistemului, Mu s = t (y x + t 2 y 2, unde y, = la C1,la 2= yD = Ladar ~ 1 cos Ф» primim
Diferențierea acestei egalități de două ori în funcție de timp (ținând cont de faptul că la C1Și la o marimile sunt constante si, in consecinta, derivatele lor sunt egale cu zero), gasim

Înlocuind această expresie în ecuația (e), determinăm dependența necesară N din t.
Răspuns: N- 176,4 + 1,13,

unde φ \u003d (i / 6) (3 / -1), t- în secunde N- în newtoni.
Problema 17.3. Masa motorului electric t x atașat la suprafața orizontală a fundației cu șuruburi (Fig. 17.3). Pe arborele motorului în unghi drept față de axa de rotație, o tijă fără greutate de lungime / este fixată la un capăt, o sarcină punctuală este montată la celălalt capăt al tijei DAR greutate t 2 . Arborele se rotește uniform la o viteză unghiulară o. Găsiți presiunea orizontală a motorului pe șuruburi. Soluţie. Luați în considerare un sistem mecanic format dintr-un motor și o greutate punctuală DAR, într-o poziţie arbitrară. Să descriem forțele externe care acționează asupra sistemului: gravitația Rx, R2, reacție de fundație sub forma unei forțe verticale N și forța orizontală R. Să cheltuim axa de coordonate x pe orizontală.
Pentru a determina presiunea orizontală a motorului pe șuruburi (și va fi numeric egală cu reacția R și îndreptată opus vectorului R ), compunem ecuația teoremei privind modificarea impulsului sistemului în proiecție pe axa orizontală x:
Pentru sistemul luat în considerare în poziția sa arbitrară, având în vedere că cantitatea de mișcare a carcasei motorului este zero, obținem Q x = - t 2 U A col. Ținând cont de faptul că V A = a s/, φ = ω/ (rotația uniformă a motorului), obținem Q x - - m 2 co/cos co/. diferenţierea Q x în timp și substituind în egalitate (a), găsim R- m 2 co 2 /sin co/.
Rețineți că tocmai aceste forțe forțează (vezi § 14.3), atunci când acţionează, vibratii fortate structurilor.
Exerciții pentru muncă independentă
- 1. Ce se numește impulsul unui punct și al unui sistem mecanic?
- 2. Cum se modifică impulsul unui punct care se mișcă uniform în jurul unui cerc?
- 3. Ce caracterizează impulsul de forță?
- 4. Forțele interne ale sistemului îi afectează impulsul? Despre mișcarea centrului său de masă?
- 5. Cum afectează cuplurile de forțe aplicate acestuia mișcarea centrului de masă al sistemului?
- 6. În ce condiții se află centrul de masă al sistemului în repaus? se deplasează uniform și în linie dreaptă?
7. Într-o barcă staționară, în absența curgerii apei, un adult stă la pupa, iar un copil stă la prova bărcii. În ce direcție se va mișca barca dacă își schimbă locul?
În care caz modulul de deplasare al bărcii va fi mare: 1) dacă copilul merge la adult în pupa; 2) dacă un adult merge la copil pe prova bărcii? Care vor fi deplasările centrului de masă al sistemului „barcă și doi oameni” în timpul acestor mișcări?