Principalele, trei axe reciproc perpendiculare trasate prin c.-l. punct al corpului și având proprietatea că dacă sunt luate ca axe de coordonate, atunci momentele de inerție centrifuge ale corpului în jurul acestor axe vor fi egale cu zero. Dacă tv. un corp fixat într-un punct este adus în rotație în jurul unei axe, care într-un punct dat este yavl. principalul O. și., atunci corpul, în absența forțelor exterioare, va continua să se rotească în jurul acestei axe, ca în jurul uneia fixe. Conceptul principalului O. și. joacă rol importantîn difuzorul televizorului corp.
Fizic Dicţionar enciclopedic. - M.: Enciclopedia Sovietică..1983 .
AXA DE INERTIE
Principalele sunt trei axe reciproc perpendiculare desenate prin Ph.D. punct al corpului, care coincide cu axele elipsoidului de inerție al corpului în acest punct. Principalul O. și. au proprietatea ca daca sunt luate ca axe de coordonate, atunci momentele de inertie centrifuga ale corpului fata de aceste axe vor fi egale cu zero. Dacă una dintre axele de coordonate, de ex. axă Oh, este pentru punct DESPRE principalul O. și., apoi momentele de inerție centrifuge, ai căror indici includ denumirea acestei axe, adică. IxyȘi eu xz, sunt egale cu zero. Dacă un corp solid, fixat într-un punct, este adus în rotație în jurul unei axe, muchia într-un punct dat este principalul O. și., atunci corpul în absența externă. forțele vor continua să se rotească în jurul acestei axe, ca în jurul uneia fixe.
Enciclopedie fizică. În 5 volume. - M.: Enciclopedia Sovietică.Redactor-șef A. M. Prokhorov.1988 .
Topoare, în raport cu care moment centrifugal de inerție este zero, se numesc principale, iar momentele de inerție în jurul acestor axe se numesc momente de inerție principale.
Să rescriem formula (2.18) ținând cont de relațiile trigonometrice cunoscute:
; ![]()
în această formă
Pentru a determina poziția axelor centrale principale, diferențiam egalitatea (2.21) față de unghiul α odată ce obținem
La o anumită valoare a unghiului α=α 0 , momentul de inerție centrifugal se poate dovedi a fi zero. Prin urmare, ținând cont de derivata ( în), momentul axial de inerție va lua o valoare extremă. Echivalarea
![]() ,
,
obținem o formulă pentru determinarea poziției principalelor axe de inerție sub forma:
![]() (2.22)
(2.22)
În formula (2.21), scoatem cos2 din paranteze α
0 și înlocuiți valoarea (2.22) acolo și, ținând cont de binecunoscuta dependență trigonometrică ![]() primim:
primim:

După simplificare, obținem în sfârșit o formulă pentru determinarea valorilor principalelor momente de inerție:
![]() (2.23)
(2.23)
Formula (20.1) este utilizată pentru a determina momentele de inerție în jurul axelor principale. Formula (2.22) nu oferă un răspuns direct la întrebarea despre care axă va fi momentul de inerție maxim sau minim. Prin analogie cu teoria studierii unei stări de tensiune plană, prezentăm formule mai convenabile pentru determinarea poziției axelor principale de inerție:
![]() (2.24)
(2.24)
Aici α 1 și α 2 determină poziția axelor, față de care momentele de inerție sunt, respectiv, egale J 1 și J 2. În acest caz, trebuie avut în vedere faptul că suma modulelor unghiurilor α 01 și α 02 trebuie să fie egal cu π/2:
Condiția (2.24) este condiția de ortogonalitate pentru axele principale de inerție ale unei secțiuni plane.
Trebuie remarcat faptul că atunci când se utilizează formulele (2.22) și (2.24) pentru a determina poziția axelor principale de inerție, trebuie respectat următorul model:
Axa principală, față de care momentul de inerție este maxim, face cel mai mic unghi cu axa inițială, față de care momentul de inerție este mai mare.
Exemplul 2.2.
Determinați caracteristicile geometrice ale secțiunilor plate ale grinzii în raport cu axele centrale principale:
 |
Soluţie
Secțiunea propusă este asimetrică. Prin urmare, poziția axelor centrale va fi determinată de două coordonate, axele centrale principale vor fi rotite față de axele centrale la un anumit unghi. Aceasta implică un astfel de algoritm pentru rezolvarea problemei determinării principalelor caracteristici geometrice.
1. Împărțim secțiunea în două dreptunghiuri cu astfel de zone și momente de inerție în jurul propriilor axe centrale:
F 1 \u003d 12 cm 2, F 2 \u003d 18 cm 2;
![]()
![]()
![]()
![]()
![]()
2. Setăm sistemul de axe auxiliare X 0 la 0 începând cu punctul DAR. Coordonatele centrelor de greutate ale dreptunghiurilor din acest sistem de axe sunt următoarele:
X 1 =4 cm; X 2 =1 cm; la 1 \u003d 1,5 cm; la 2 \u003d 4,5 cm.
3. Determinați coordonatele centrului de greutate al secțiunii conform formulelor (2.4):
Aplicam axele centrale (cu rosu in Fig. 2.9).
4. Calculăm momentele de inerție axiale și centrifuge față de axele centrale X cu si la c conform formulelor (2.13) aplicate unei secțiuni compozite:
5. Găsim momentele principale de inerție conform formulei (2.23)
6. Determinați poziția principalelor axe centrale de inerție XȘi la prin formula (2.24):
Principalele axe centrale sunt prezentate în (Fig. 2.9) cu albastru.
7. Să verificăm calculele efectuate. Pentru a face acest lucru, vom efectua următoarele calcule:
Suma momentelor axiale de inerție în jurul axelor centrale și centrale principale trebuie să fie aceeași:
Suma modulelor unghiurilor α Xși α y,, definind pozitia axelor centrale principale:
În plus, prevederea că axa centrală principală X, raportat la care momentul de inerție J x Are valoare maximă, face un unghi mai mic cu axa centrala, fata de care momentul de inertie este mai mare, i.e. cu ax X din.
Axele principale de inerție și momentele principale de inerție.
Când unghiul se schimbă, valorile lui Ix1, Iy1 și Ix1y1 se schimbă. Aflați valoarea unghiului la care Ix1 și Iy1 au valori extreme; pentru a face acest lucru, luăm derivata întâi față de Ix1 sau Iy1 și o punem egală cu zero: sau de unde (1.28)
Această formulă determină poziția a două axe, față de una dintre care momentul de inerție axial este maxim, iar față de cealaltă este minim.
Astfel de axe sunt numite principale. Momentele de inerție în jurul axelor principale se numesc momente de inerție principale.
Găsim valorile principalelor momente de inerție din formulele (1.23) și (1.24), substituind în ele din formula (1.28), folosind formulele de trigonometrie cunoscute pentru funcțiile unghiurilor duble.
După transformări, obținem următoarea formulă pentru determinarea principalelor momente de inerție: (1.29)
Examinând derivata a doua, se poate stabili că pentru acest caz (Ix< Iy) максимальный момент инерции Imax имеет место относительно главной оси, повернутой на угол по отношению к оси х, а минимальный момент инерции - относительно другой, перпендикулярной оси. В большинстве случаев в этом исследовании нет надобности, так как по конфигурации сечений видно, какая из главных осей соответствует максимуму момента инерции.
Axele principale care trec prin centrul de greutate al secțiunii se numesc axe centrale principale.
În multe cazuri, este posibil să se determine imediat poziția axelor centrale principale. Dacă figura are o axă de simetrie, atunci este una dintre principalele axe centrale, a doua trece prin centrul de greutate al secțiunii perpendicular pe prima. Cele de mai sus rezultă din faptul că în raport cu axa de simetrie și orice axă perpendiculară pe aceasta, momentul de inerție centrifugal este egal cu zero.
Dacă cele două momente centrale principale de inerție ale secțiunii sunt egale între ele, atunci pentru această secțiune orice axă centrală este cea principală, iar toate momentele centrale de inerție principale sunt aceleași (cerc, pătrat, hexagon, hexagon echilateral) .
9. Caracteristicile geometrice de bază ale secțiunilor
Aici: C- centrul de greutate al sectiunilor plate;
A- arie a secțiunii transversale;
eu X , eu y- momentele de inerție axiale ale secțiunii față de axele principale;
eu xI , eu yI- momentele de inerție axiale față de axele auxiliare;
eu p- momentul polar de inerție al secțiunii;
W X , W y- momente axiale de rezistenta;
W p- momentul polar de rezistență
Secțiune dreptunghiulară


Secțiune transversală a unui triunghi isoscel

10. Principalele tipuri de forțe care acționează asupra corpului. Moment de forță în jurul centrului. Proprietățile momentului.
Când luăm în considerare problemele mecanice, majoritatea forțelor care acționează asupra corpurilor pot fi atribuite la trei soiuri principale:
Forța gravitației;
Forța de frecare;
Forță elastică.
Toate corpurile din jurul nostru sunt atrase de Pământ, acest lucru se datorează acțiunii forțelor de gravitație universală. Dacă neglijăm rezistența aerului, atunci știm deja că toate corpurile cad pe Pământ cu aceeași accelerație - accelerația căderii libere.
Ca orice obiect, un corp suspendat pe un arc tinde să cadă din cauza gravitației Pământului, dar când arcul se întinde la o anumită lungime, corpul se oprește, adică ajunge într-o stare de echilibru mecanic. Știm deja că echilibrul mecanic are loc atunci când suma forțelor care acționează asupra corpului este zero. Aceasta înseamnă că forța gravitațională care acționează asupra sarcinii trebuie să se echilibreze cu o anumită forță care acționează din partea arcului. Această forță, îndreptată împotriva forței gravitaționale și care acționează din partea arcului, se numește forță elastică.
După trecerea unei anumite distanțe, corpul se oprește, viteza corpului scade de la valoarea inițială la zero, adică accelerația corpului este o valoare negativă. În consecință, asupra corpului acționează din partea suprafeței o forță care tinde să oprească acest corp, adică acționează împotriva vitezei sale. Această forță se numește forță de frecare.
Moment de forță în jurul centrului (punctului).
Moment de forță F relativ la centru (punct) DESPRE numit vector m o (F) egal produs vectorial raza vectoriala r desenat din centru DESPRE exact DAR aplicarea forței, pe vectorul forței F: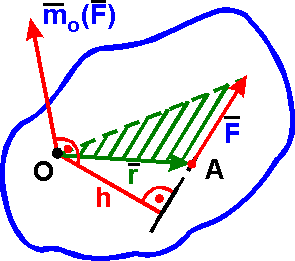
unde umărul h este o perpendiculară coborâtă din centru DESPRE la linia de forță F.
Moment m o (F) caracterizează efectul de rotație al forței F în jurul centrului (punctului) DESPRE.
Proprietățile momentului de forță:
1. Moment de forță în jurul centrului nu se schimba la transferul puterii de-a lungul liniei de acţiuneîn orice punct;
2. Dacă linie de acțiune forța trece prin centru DESPRE(h = 0), apoi momentul forței în jurul centrului DESPRE zero.
Dacă orice corp este adus în rotație în jurul unei axe arbitrare și apoi lăsat la sine, atunci poziția axei de rotație în spațiu, în general, se va schimba: axa fie se va roti, fie se va mișca în raport cu cadrul de referință inerțial. Pentru a menține o axă luată în mod arbitrar într-o poziție constantă, trebuie să i se aplice anumite forțe.
Axa de rotație a corpului, a cărei poziție în spațiu este menținută fără aplicarea unor forțe din exterior, se numește axă liberă corp.
Se poate demonstra că există cel puțin trei axe reciproc perpendiculare care trec prin centrul de masă al corpului, care pot servi ca axe libere. Se numesc astfel de axe axele principale de inerție corp.
Se numesc momentele de inerție ale unui corp față de axele principale principalele momente de inerție.
Pentru corpurile cu simetrie axială (de exemplu, un cilindru omogen), una dintre axele principale coincide cu axa de simetrie și orice două axe perpendiculare pe axa de simetrie și între ele și care trec prin centrul de masă al corpului sunt şi cele principale (Fig. 7.15) . Momentele de inerție în jurul ultimelor două axe sunt egale între ele, iar momentul de inerție în jurul axei de simetrie este diferit de ele
Un astfel de corp este numit varf simetric.

Orez. 7.15. Axele principale ale unui cilindru omogen
Pentru un corp cu simetrie centrală (de exemplu, pentru o minge omogenă), oricare trei axe reciproc perpendiculare care trec prin centrul de simetrie sunt principale. Pentru ei
Astfel de corpuri sunt numite blaturi. Orice axă a unui vârf sferic care trece prin centrul de simetrie este principală (și, prin urmare, liberă).
În cazul general, principalele momente de inerție ale corpului sunt diferite, adică
Un astfel de corp este numit varf asimetric. Un exemplu de vârf asimetric este un paralelipiped dreptunghiular omogen (Fig. 7.16).

Orez. 7.16. Axele principale ale unui paralelipiped omogen
Cu rotația „aproape” liberă, micile perturbații pot acționa asupra corpului. Dacă, sub astfel de perturbări, axa de rotație își schimbă puțin poziția, atunci se numește rotație durabil. Altfel, vorbește despre instabil rotație.
Fie ca, pentru certitudine, următoarea relație între momentele principale de inerție să fie valabilă pentru un vârf asimetric:
Se poate arăta că rotația în jurul axelor 1 și 3 (adică axelor cu momente maxime și minime de inerție) va fi stabilă, iar în jurul axei 2 (cu un moment de inerție intermediar) - instabilă.
Video 7.4. Stabilitatea zborului în aer cuboid
Lăsați corpul să se rotească în jurul uneia dintre axele principale, de exemplu, în jurul axei z. Apoi vectorul viteză unghiulară are forma
Momentele axiale de inerție ale secțiunii despre topoare XȘi la(vezi fig. 32, dar) se numesc integrale definite ale formei
La determinarea momentelor axiale de inerție, în unele cazuri trebuie să se întâlnească o altă caracteristică geometrică nouă a secțiunii - momentul de inerție centrifugal.
moment de inerție centrifugal secțiuni despre două axe reciproc perpendiculare X y(vezi fig. 32, dar)
Momentul polar de inerție secţiune relativă la origine DESPRE(vezi fig. 32, dar) numit integrala definita drăguț
Unde R- distanta de la originea coordonatelor pana la zona elementara d.A.
Momentele axiale și polare de inerție sunt întotdeauna pozitive, iar momentul centrifugal, în funcție de alegerea axelor, poate fi pozitiv, negativ sau egal cu zero. Unități de desemnare a momentelor de inerție - cm 4, mm 4.
Există următoarea relație între momentele de inerție polar și axial:

Conform formulei (41), suma momentelor axiale de inerție în jurul a două axe reciproc perpendiculare este egală cu momentul polar de inerție în jurul punctului de intersecție a acestor axe (originea).
Momentele de inerție ale secțiunilor relativ la axe paralele, dintre care unele sunt centrale (x s, noi)> sunt determinate din expresiile: 
Unde și iv- coordonatele centrului de greutate C al secțiunii (Fig. 34).
Formule (42) cu mari uz practic, se citesc astfel: momentul de inerție al unei secțiuni în jurul oricărei axe este egal cu momentul de inerție în jurul unei axe paralele cu aceasta și care trece prin centrul de greutate al secțiunii, plus produsul ariei secțiunii cu pătratul a distanței dintre axe.
Notă: coordonate a și c trebuie înlocuite cu formulele (42) prezentate mai sus, ținând cont de semnele acestora.

Orez. 34.
Din formulele (42) rezultă că dintre toate momentele de inerție în jurul axelor paralele, cel mai mic moment va fi în jurul axei care trece prin centrul de greutate al secțiunii, adică momentul central de inerție.
Formulele pentru determinarea rezistenței și rigidității unei structuri includ momente de inerție, care sunt calculate în raport cu axele care sunt nu numai centrale, ci și principale. Pentru a determina care axe care trec prin centrul de greutate sunt principalele, trebuie să se poată determina momentele de inerție în jurul axelor rotite unele față de altele la un anumit unghi.
Dependența dintre momentele de inerție în timpul rotației axelor de coordonate (Fig. 35) au următoarea formă:

Unde dar- unghiul de rotatie al axelor ȘiȘi v despre topoare henna respectiv. Se consideră unghiul a pozitiv dacă rotirea axelor Și si tu mergi în sens invers acelor de ceasornic.

Orez. 35.
Suma momentelor axiale de inerție în jurul oricăror axe reciproc perpendiculare nu se modifică atunci când acestea sunt rotite:
Când axele se rotesc în jurul originii, momentul de inerție centrifugal se modifică continuu, prin urmare, la o anumită poziție a axelor, devine egală cu zero.
Două axe reciproc perpendiculare față de care momentul de inerție centrifugal al secțiunii este egal cu zero se numesc axele principale de inerție.
Direcția axelor principale de inerție poate fi determinată după cum urmează:

Două valori ale unghiului obținute din formula (43) dar diferă între ele cu 90° și dau poziția axelor principale. După cum puteți vedea, cel mai mic dintre aceste unghiuri nu depășește în valoare absolută l /4.În viitor, vom folosi doar un unghi mai mic. Realizat în acest unghi axa principală va fi notat cu litera Și. Pe fig. 36 prezintă câteva exemple de desemnare a axelor principale în conformitate cu această regulă. Axele inițiale sunt notate cu litere hee w.

Orez. 36.
În problemele de încovoiere, este important să se cunoască momentele axiale de inerție ale secțiunilor în raport cu acele axe principale care trec prin centrul de greutate al secțiunii.
Se numesc axele principale care trec prin centrul de greutate al secțiunii axele centrale principale.În cele ce urmează, de regulă, pentru concizie vom numi aceste axe simplu axele principale, omițând cuvântul „central”.
Axa de simetrie a unei secțiuni plane este principala axă centrală de inerție a acestei secțiuni, a doua axă fiind perpendiculară pe aceasta. Cu alte cuvinte, axa de simetrie și oricare perpendiculară pe aceasta formează un sistem de axe principale.
Dacă o secțiune plană are cel puțin două axe de simetrie care nu sunt perpendiculare una pe cealaltă, atunci toate axele care trec prin centrul de greutate al unei astfel de secțiuni sunt principalele sale axe centrale de inerție. Deci, în fig. 37 prezintă câteva tipuri de secțiuni (cerc, inel, pătrat, hexagon regulat etc.), care au următoarea proprietate: orice axă care trece prin centrul lor de greutate este principala.

Orez. 37.
Trebuie menționat că axele principale non-centrale nu ne interesează.
În teoria îndoirii cea mai mare valoare au momente de inerție față de principalele axe centrale.
Principal momente centrale inerţie sau principalele momente de inerție sunt momentele de inerție față de principalele axe centrale. Mai mult, raportat la una dintre axele principale, momentul de inerție maxim, în raport cu celălalt - minim:

Momentele axiale de inerție ale secțiunilor prezentate în fig. 37, calculate în raport cu axele centrale principale, sunt egale între ele: J y , apoi: J u = J x cos 2 a + J y sin a = J x .
Momentele de inerție ale unei secțiuni complexe sunt egale cu suma momentelor de inerție ale părților sale. Prin urmare, pentru a determina momentele de inerție ale unei secțiuni complexe, putem scrie:
Unde eJ xi , J y „ J xiyi - momentele de inerție ale părților individuale ale secțiunii.
NB: dacă secțiunea are o gaură, atunci este convenabil să o considerați ca o secțiune cu o zonă negativă.
Pentru a efectua calcule de rezistență în viitor, introducem o nouă caracteristică geometrică a rezistenței unei bare care lucrează într-o curbă dreaptă. Această geometrie se numește moment axial rezistență sau modul de încovoiere.
Raportul dintre momentul de inerție al unei secțiuni în jurul unei axe și distanța de la această axă până la punctul cel mai îndepărtat al secțiunii se numește moment axial de rezistenta:
Momentul de rezistență are dimensiunea mm 3, cm 3.
Momentele de inerție și momentele de rezistență dintre cele mai comune secțiuni simple sunt determinate de formulele date în tabel. 3.
Pentru grinzile din oțel laminate (grinzi în I, grinzi cu canale, grinzi unghiulare etc.), momentele de inerție și momentele de rezistență sunt date în tabelele sortimentului de oțeluri laminate, unde, pe lângă dimensiuni, secțiunea transversală. sunt date zonele, pozițiile centrelor de greutate și alte caracteristici.
În concluzie, introducem conceptul rază de girație secţiuni relativ la axele de coordonate XȘi la - eu xȘi eu y respectiv, care sunt determinate de următoarele formule.