zadaci kretanja
Koristimo jednačinu (4) i uzimamo njen izvod s obzirom na vrijeme
U (8), sa jediničnim vektorima, postoje projekcije vektora brzine na koordinatne ose
Projekcije brzine na koordinatne ose definiraju se kao prve vremenske derivacije odgovarajućih koordinata.
Poznavajući projekcije, može se pronaći vektorski modul i njegov pravac
 ,
(10)
,
(10)
Određivanje brzine na prirodan način
zadaci kretanja
Neka je data putanja materijalne tačke i zakon promjene krivolinijske koordinate. Pretpostavimo na t 1 bod imao  i koordinata s 1 , dok t 2 - koordinata s 2. Tokom
i koordinata s 1 , dok t 2 - koordinata s 2. Tokom
 koordinata je povećana
koordinata je povećana  , onda prosječna brzina bodova
, onda prosječna brzina bodova
 .
.
Da bismo pronašli brzinu u datom trenutku, prelazimo do granice
 ,
,
 .
(12)
.
(12)
Vektor brzine tačke na prirodan način specificiranja kretanja definira se kao prvi vremenski izvod krivolinijske koordinate.
tačka ubrzanja
Pod ubrzanjem materijalne tačke razumjeti vektorsku veličinu koja karakterizira brzinu promjene vektora brzine tačke u veličini i smjeru tokom vremena.
Ubrzanje tačke vektorskom metodom zadavanja kretanja
Razmotrite tačku u dvije tačke u vremenu t 1
( ) i t 2
(
) i t 2
( ), onda
), onda  - vremensko povećanje
- vremensko povećanje  - prirast brzine.
- prirast brzine.
Vector  uvijek leži u ravni kretanja i usmjeren je prema konkavnosti putanje.
uvijek leži u ravni kretanja i usmjeren je prema konkavnosti putanje.
P 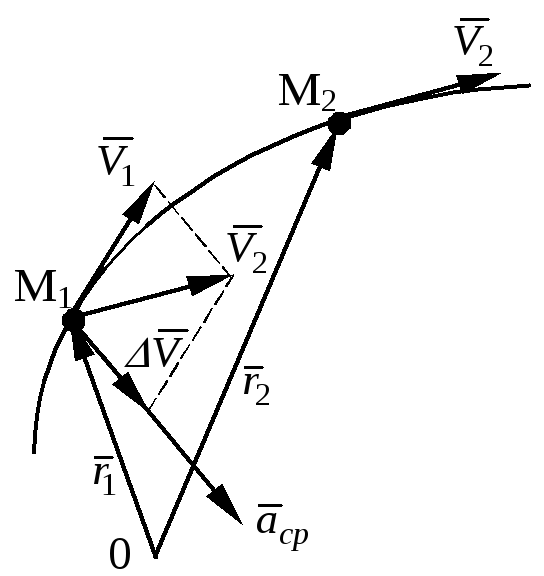 jedan prosječno ubrzanje tačke tokom
t
shvati veličinu
jedan prosječno ubrzanje tačke tokom
t
shvati veličinu
 .
(13)
.
(13)
Da bismo pronašli ubrzanje u datom trenutku vremena, prelazimo na granicu
 ,
,
 .
(14)
.
(14)
Ubrzanje tačke u datom trenutku je definisano kao drugi vremenski izvod vektora radijusa tačke ili prvi vremenski izvod vektora brzine.
Vektor ubrzanja se nalazi u susednoj ravni i usmeren je prema udubljenosti putanje.
Ubrzanje tačke sa koordinatnom metodom zadavanja kretanja
Koristimo jednačinu veze između vektorskog i koordinatnog načina zadavanja kretanja
I uzmite drugu izvedenicu od toga
 ,
,
 .
(15)
.
(15)
U jednadžbi (15), sa jediničnim vektorima, postoje projekcije vektora ubrzanja na koordinatne ose
 .
(16)
.
(16)
Projekcije ubrzanja na koordinatne ose definiraju se kao prve vremenske derivacije projekcija brzine ili kao druge vremenske derivacije odgovarajućih koordinata.
Modul i smjer vektora ubrzanja mogu se naći iz sljedećih izraza
 ,
(17)
,
(17)
 ,
,
 ,
, .
(18)
.
(18)
Ubrzanje tačke sa prirodnim načinom specificiranja kretanja
P  Neka se tačka kreće duž krivolinijske putanje. Razmotrite dva njegova položaja u trenucima vremena t
(s, M, v) i t 1
(s 1 , M 1 , v 1).
Neka se tačka kreće duž krivolinijske putanje. Razmotrite dva njegova položaja u trenucima vremena t
(s, M, v) i t 1
(s 1 , M 1 , v 1).
U ovom slučaju, ubrzanje se određuje preko njegovih projekcija na ose prirodnog koordinatnog sistema koji se kreću zajedno sa tačkom M. Ose su usmerene na sledeći način:
M - tangenta, usmjerena duž tangente na putanju, prema pozitivnoj referenci udaljenosti,
M n- glavna normala, usmjerena duž normale koja leži u susjednoj ravni i usmjerena prema udubljenosti putanje,
M b je binormala, okomita na ravan M n i formira desnu trojku sa prvim osama.
Pošto vektor ubrzanja leži u susednoj ravni, onda a b = 0. Nađimo projekcije ubrzanja na druge ose.
 .
(19)
.
(19)
Projektujmo (19) na koordinatne ose
 ,
(20)
,
(20)
 .
(21)
.
(21)
Povucite kroz tačku M 1 os paralelno sa osovinama u tački M i pronađite projekcije brzine:
gdje - takozvani ugao susjedstva.
Zamijeni (22) u (20)
 .
.
At t 0 0, cos 1 onda

 .
(23)
.
(23)
Tangencijalno ubrzanje tačke određeno je prvim vremenskim izvodom brzine ili drugim vremenskim izvodom krivolinijske koordinate.
Tangencijalno ubrzanje karakterizira promjenu veličine vektora brzine.
Zamijeni (22) u (21)
 .
.
Pomnožite brojilac i imenilac sa s da dobijete poznate granice
gdje  (prva izuzetna granica),
(prva izuzetna granica),
 ,
, ,
,
 , gdje
- radijus zakrivljenosti putanje.
, gdje
- radijus zakrivljenosti putanje.
Zamjenom izračunatih granica u (24) dobijamo
 .
(25)
.
(25)
Normalno ubrzanje tačke određeno je omjerom kvadrata brzine i polumjera zakrivljenosti putanje u datoj tački.
Normalno ubrzanje karakterizira promjenu vektora brzine u smjeru i uvijek je usmjereno prema konkavnosti putanje.
Konačno, dobijamo projekcije ubrzanja materijalne tačke na ose prirodnog koordinatnog sistema i modula vektora

 ,
(26)
,
(26)
 .
(27)
.
(27)
Formule za izračunavanje brzine tačke, ubrzanja, poluprečnika krivine putanje, tangente, normale i binormale prema datim zavisnostima koordinata od vremena. Primjer rješavanja problema u kojem date jednačine kretanja, morate odrediti brzinu i ubrzanje tačke. Također se određuju polumjer zakrivljenosti putanje, tangenta, normala i binormala.
SadržajUvod
Zaključci dole navedenih formula i prikaz teorije dati su na stranici “Kinematika materijalne tačke”. Ovdje primjenjujemo glavne rezultate ove teorije na koordinatnu metodu specificiranja kretanja materijalne tačke.
Neka imamo fiksni pravougaoni koordinatni sistem sa centrom u fiksnoj tački. U ovom slučaju, položaj tačke M je jednoznačno određen njenim koordinatama (x, y, z). Koordinatni metod specificiranja kretanja tačke- ovo je metoda u kojoj se daju zavisnosti koordinata od vremena. To jest, date su tri funkcije vremena (za trodimenzionalno kretanje):
Definicija kinematičkih veličina
Znajući ovisnost koordinata o vremenu, automatski određujemo vektor radijusa materijalne točke M po formuli:
,
gdje su jedinični vektori (orths) u smjeru x, y, z osa.
Diferencirajući s obzirom na vrijeme, nalazimo projekcije brzine i ubrzanja na koordinatne osi:
;
;
Moduli brzine i ubrzanja:
;
.
.
Tangencijalno (tangencijalno) ubrzanje je projekcija ukupnog ubrzanja na smjer brzine:
.
Vektor tangencijalnog (tangencijalnog) ubrzanja:
Normalno ubrzanje:
.
;
.
Jedinični vektor u smjeru glavne normale putanje:
.
Radijus zakrivljenosti putanje:
.
Centar zakrivljenosti staze:
.
.
Primjer rješenja problema
Određivanje brzine i ubrzanja tačke prema datim jednačinama njenog kretanja
Prema zadatim jednačinama kretanja tačke utvrditi tip njene putanje i za trenutak vremena odrediti položaj tačke na putanji, njenu brzinu, puno, tangencijalno i normalno ubrzanje, kao i poluprečnik zakrivljenosti putanje.
Jednačine kretanja tačke:
, cm;
, cm.
Odluka
Određivanje vrste putanje
Isključujemo vrijeme iz jednačina kretanja. Da bismo to učinili, prepisujemo ih u obliku:
;
.
Primijenimo formulu:
.
;
;
;
.
Dakle, dobili smo jednačinu putanje:
.
Ovo je jednadžba parabole sa vrhom u tački i osom simetrije.
Ukoliko
, onda
; ili
.
Slično, dobijamo ograničenje za koordinate:
;
;
Dakle, putanja tačke je luk parabole
,
nalazi se na
i .
Od tačaka gradimo parabolu.
| 0 | 6 |
| 3 | 5,625 |
| 6 | 4,5 |
| devet | 2,625 |
| 12 | 0 |
Odredite poziciju tačke u vremenu.
;
.
Određivanje brzine tačke
Diferencirajući koordinate i s obzirom na vrijeme, nalazimo komponente brzine.
.
Za razlikovanje, zgodno je primijeniti formulu trigonometrije:
. Onda
;
.
Izračunavamo vrijednosti komponenti brzine u trenutku:
;
.
Modul brzine:
.
Određivanje ubrzanja tačke
Razlikovanjem komponenti brzine i s obzirom na vrijeme, nalazimo komponente ubrzanja tačke.
;
.
Izračunajte vrijednosti komponenti ubrzanja u vremenu:
;
.
Modul za ubrzanje:
.
Tangencijalno ubrzanje je projekcija ukupnog ubrzanja na smjer brzine:
.
Budući da je , tada je vektor tangencijalnog ubrzanja usmjeren suprotno brzini .
Normalno ubrzanje:
.
Vektor i usmjeren je prema centru zakrivljenosti putanje.
Radijus zakrivljenosti putanje:
.
Putanja tačke je luk parabole
;
.
Brzina tačke: .
Ubrzanje tačke: ; ; .
Polumjer zakrivljenosti putanje: .
Definicija drugih veličina
Prilikom rješavanja problema utvrdili smo:
vektor i modul brzine:
;
;
vektor i ukupni modul ubrzanja:
;
;
tangencijalno i normalno ubrzanje:
;
;
polumjer zakrivljenosti putanje: .
Definirajmo preostale količine.
Jedinični vektor u smjeru tangente putanje:
.
Vektor tangencijalnog ubrzanja:
.
Vektor normalnog ubrzanja:
.
Jedinični vektor u smjeru glavne normale:
.
Koordinate centra zakrivljenosti putanje:
.
Uvedemo treću os koordinatnog sistema okomito na ose i . U 3D sistemu
;
.
Jedinični vektor u binormalnom smjeru:
.
Kretanje tačke u prostoru može se smatrati datim ako su poznati zakoni promjene njene tri kartezijanske koordinate x, y, z kao funkcija vremena. Međutim, u nekim slučajevima prostornog kretanja materijalnih tačaka (na primjer, u područjima ograničene površine razne forme), upotreba jednadžbi kretanja u kartezijanskim koordinatama je nezgodna, jer postaju previše glomazne. U takvim slučajevima može se izabrati druga tri nezavisna skalarna parametra $q_1,(\ q)_2,\ \ q_3$, nazvana krivolinijskim ili generalizovanim koordinatama, koji takođe jednoznačno određuju položaj tačke u prostoru.
Brzina tačke M pri određivanju njenog kretanja u krivolinijskim koordinatama određuje se u obliku vektorska suma komponente brzine paralelne sa koordinatnim osama:
\[\overrightarrow(v)=\frac(d\overrightarrow(r))(dt)=\frac(\partial \overrightarrow(r))(\partial q_1)\dot(q_1)+\frac(\partial \ overrightarrow(r))(\partial q_2)\dot(q_2)+\frac(\partial \overrightarrow(r))(\partial q_3)\dot(q_3)=v_(q_1)\overline(e_1)+v_( q_2)\overline(e_2)\+v_(q_3)\overline(e_3)\]
Projekcije vektora brzine na odgovarajuće koordinatne ose su: $v_(q_i)=\overline(v\ )\cdot \overline(e_i)=H_i\dot(q_i)\ \ ,\ \ i=\overline(1 ,3)$
Ovdje je $H_i=\left|(\left(\frac(\partial \overrightarrow(r))(\partial q_i)\right))_M\right|$ parametar koji se zove i-ti koeficijent Lame i jednak je modulu parcijalnog izvoda radijus vektora tačke duž i-te krivolinijske koordinate izračunate u datoj tački M. Svaki od vektora $\overline(e_i)$ ima smjer koji odgovara smjeru kretanja krajnje tačke radijus vektora $r_i$ u i-th generalizovana koordinata. Modul brzine u ortogonalnom krivolinijskom koordinatnom sistemu može se izračunati iz zavisnosti:
U gornjim formulama izračunavaju se vrijednosti izvoda i Lameovih koeficijenata za trenutni položaj tačke M u prostoru.
Koordinate tačke u sfernom koordinatnom sistemu su skalarni parametri r, $(\mathbf \varphi ),\ (\mathbf \theta )$ računati kao što je prikazano na slici. jedan.
Slika 1. Vektor brzine u sfernim koordinatama
Sistem jednadžbi kretanja tačke u ovom slučaju ima oblik:
\[\left\( \begin(array)(c) r=r(t) \\ \varphi =\varphi (t \\ \theta =\theta (t \end(array) \right.\)
Na sl. Slika 1 prikazuje vektor radijusa r povučen iz ishodišta, uglove $(\mathbf \varphi )$ i $(\mathbf \theta )$, kao i koordinatne linije i ose razmatranog sistema u proizvoljnoj tački M od putanja. Može se vidjeti da koordinatne prave $((\mathbf \varphi ))$ i $((\mathbf \theta ))$ leže na površini sfere polumjera r. Ovaj krivolinijski koordinatni sistem je također ortogonan. Kartezijanske koordinate može se izraziti u terminima sfernih koordinata na sljedeći način:
Tada su Lameovi koeficijenti: $H_r=1;\ \ H_(\varphi )=rsin\varphi ;\ \ H_0=r$ ; projekcije brzine tačke na ose sfernog koordinatnog sistema $v_r=\dot(r\ \ );$ $v_(\theta )=r\dot(\theta )$; $\ v_(\varphi )=r\dot(\varphi )sin\theta $, i modul vektora brzine
Ubrzanje tačke u sfernom koordinatnom sistemu
\[\overrightarrow(a)=a_r(\overrightarrow(e))_r+a_(\varphi )(\overrightarrow(e))_(\varphi )+a_(\theta )(\overrightarrow(e))_( \theta ),\]
projekcije ubrzanja tačke na ose sfernog koordinatnog sistema
\ \
Modul ubrzanja $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))$
Zadatak 1
Tačka se kreće duž linije presjeka sfere i cilindra prema jednadžbi: r = R, $\varphi $ = kt/2, $\theta $ = kt/2 , (r, $\varphi $, $ \theta $ --- sferni koordinate). Naći modul i projekcije brzine tačke na osi sfernog koordinatnog sistema.
Nađimo projekcije vektora brzine na osi sfernih koordinata:
Modul brzine $v=\sqrt(v^2_r+v^2_(\varphi )+v^2_(\theta ))=R\frac(k)(2)\sqrt((sin)^2\frac(kt )(2)+1)$
Zadatak 2
Koristeći uvjet zadatka 1, odredite modul ubrzanja točke.
Nađimo projekcije vektora ubrzanja na osi sfernih koordinata:
\ \ \
Modul ubrzanja $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))=R\frac(k^2)(4)\sqrt(4+(sin)^2 \frac(kt)(2))$