sarcini de mișcare
Folosim ecuația (4) și luăm derivata ei în raport cu timpul
În (8), cu vectori unitari, există proiecții ale vectorului viteză axele de coordonate
Proiecțiile vitezei pe axele de coordonate sunt definite ca derivate primare ale coordonatelor corespunzătoare.
Cunoscând proiecțiile, se pot găsi modulul vectorialși direcția lui
 ,
(10)
,
(10)
Determinarea vitezei în mod natural
sarcini de mișcare
Să fie date traiectoria unui punct material și legea de modificare a coordonatei curbilinii. Să presupunem că la t 1 punct avut  si coordonata s 1, în timp ce t 2 - coordonata s 2. Pe parcursul
si coordonata s 1, în timp ce t 2 - coordonata s 2. Pe parcursul
 coordonatele au fost incrementate
coordonatele au fost incrementate  , apoi viteza medie puncte
, apoi viteza medie puncte
 .
.
Pentru a găsi viteza la un moment dat de timp, trecem la limită
 ,
,
 .
(12)
.
(12)
Vectorul viteză al unui punct în modul natural de specificare a mișcării este definit ca prima derivată temporală a coordonatei curbilinii.
accelerație punctuală
Sub accelerația unui punct materialînțelegeți o mărime vectorială care caracterizează viteza de schimbare a vectorului viteză a unui punct în mărime și direcție în timp.
Accelerația unui punct cu metoda vectorială de specificare a mișcării
Luați în considerare un punct în două momente în timp t 1
( ) Și t 2
(
) Și t 2
( ), apoi
), apoi  - increment de timp
- increment de timp  - creşterea vitezei.
- creşterea vitezei.
Vector  se află întotdeauna în planul mișcării și este îndreptată spre concavitatea traiectoriei.
se află întotdeauna în planul mișcării și este îndreptată spre concavitatea traiectoriei.
P 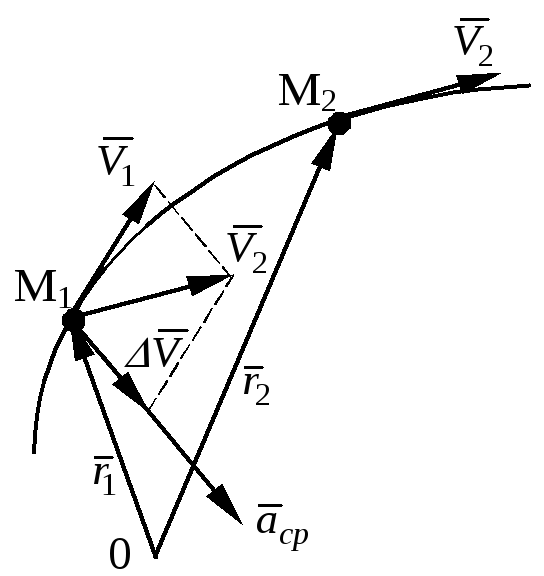 unu accelerația punctuală medie pe parcursul
t
intelege amploarea
unu accelerația punctuală medie pe parcursul
t
intelege amploarea
 .
(13)
.
(13)
Pentru a găsi accelerația la un moment dat de timp, trecem la limită
 ,
,
 .
(14)
.
(14)
Accelerația unui punct la un moment dat este definită ca a doua derivată temporală a vectorului raza punctului sau prima derivată temporală a vectorului viteză.
Vectorul accelerație este situat în planul contiguu și este îndreptat spre concavitatea traiectoriei.
Accelerația unui punct cu metoda coordonatelor de specificare a mișcării
Să folosim ecuația conexiunii dintre metodele vectoriale și de coordonate de specificare a mișcării
Și luați a doua derivată din ea
 ,
,
 .
(15)
.
(15)
În ecuația (15), cu vectori unitari, există proiecții ale vectorului accelerație pe axele de coordonate
 .
(16)
.
(16)
Proiecțiile accelerației pe axele de coordonate sunt definite ca derivate primare în timp ale proiecțiilor vitezei sau ca derivate a doua în timp ale coordonatelor corespunzătoare.
Modulul și direcția vectorului de accelerație pot fi găsite din următoarele expresii
 ,
(17)
,
(17)
 ,
,
 ,
, .
(18)
.
(18)
Accelerația unui punct cu un mod natural de a specifica mișcarea
P  Lăsați punctul să se miște pe o traiectorie curbilinie. Luați în considerare două dintre pozițiile sale în momentele de timp t
(s, M, v) Și t 1
(s 1 , M 1 , v 1).
Lăsați punctul să se miște pe o traiectorie curbilinie. Luați în considerare două dintre pozițiile sale în momentele de timp t
(s, M, v) Și t 1
(s 1 , M 1 , v 1).
În acest caz, accelerația se determină prin proiecțiile sale pe axele sistemului natural de coordonate care se deplasează împreună cu punctul M. Axele sunt direcționate astfel:
M - tangentă, îndreptată de-a lungul tangentei la traiectorie, spre referința pozitivă a distanței,
M n- normala principală, îndreptată de-a lungul normalului situat în planul contiguu și îndreptată spre concavitatea traiectoriei,
M b este binormalul, perpendicular pe planul M nși formează un triplu drept cu primele axe.
Deoarece vectorul de accelerație se află într-un plan contiguu, atunci A b = 0. Să găsim proiecții ale accelerației pe alte axe.
 .
(19)
.
(19)
Să proiectăm (19) pe axele de coordonate
 ,
(20)
,
(20)
 .
(21)
.
(21)
Desenați prin axa punctului M 1 paralel cu axeleîn punctul M și găsiți proiecțiile vitezei:
Unde - așa-numitul unghi de adiacență.
Înlocuiește (22) în (20)
 .
.
La t 0 0, cos 1 atunci

 .
(23)
.
(23)
Accelerația tangențială a unui punct este determinată de prima derivată de timp a vitezei sau de a doua derivată de timp a coordonatei curbilinie.
Accelerația tangențială caracterizează modificarea mărimii vectorului viteză.
Înlocuiește (22) în (21)
 .
.
Înmulțiți numărătorul și numitorul cu s pentru a obține limite cunoscute
Unde  (prima limită remarcabilă),
(prima limită remarcabilă),
 ,
, ,
,
 , Unde
- raza de curbură a traiectoriei.
, Unde
- raza de curbură a traiectoriei.
Înlocuind limitele calculate în (24), obținem
 .
(25)
.
(25)
Accelerația normală a unui punct este determinată de raportul dintre pătratul vitezei și raza de curbură a traiectoriei în punctul dat.
Accelerația normală caracterizează schimbarea vectorului viteză în direcție și este întotdeauna îndreptată spre concavitatea traiectoriei.
În final, obținem proiecțiile accelerației punctului material pe axele sistemului natural de coordonate și modulul vectorului.

 ,
(26)
,
(26)
 .
(27)
.
(27)
Formule pentru calcularea vitezei unui punct, accelerației, razei de curbură a traiectoriei, tangentei, normale și binormale în funcție de dependențele date ale coordonatelor în timp. Un exemplu de rezolvare a unei probleme în care ecuații date mișcare, trebuie să determinați viteza și accelerația punctului. Se determină și raza de curbură a traiectoriei, tangentă, normală și binormală.
ConţinutIntroducere
Concluziile formulelor de mai jos și prezentarea teoriei sunt date pe pagina „Cinematica unui punct material”. Aici aplicăm principalele rezultate ale acestei teorii la metoda coordonatelor de specificare a mișcării unui punct material.
Să avem un sistem de coordonate dreptunghiular fix centrat într-un punct fix. În acest caz, poziția punctului M este determinată în mod unic de coordonatele sale (x, y, z). Metoda de coordonare de specificare a mișcării punctului- aceasta este o metodă în care sunt date dependențele coordonatelor de timp. Adică, sunt date trei funcții de timp (pentru mișcarea tridimensională):
Definiţia kinematic quantities
Cunoscând dependența coordonatelor de timp, determinăm automat vectorul rază a punctului material M prin formula:
,
unde sunt vectori unitari (orturi) în direcția axelor x, y, z.
Diferențiând în funcție de timp, găsim proiecțiile vitezei și accelerației pe axele de coordonate:
;
;
Module de viteză și accelerație:
;
.
.
Accelerația tangențială (tangențială) este proiecția accelerației totale pe direcția vitezei:
.
Vector de accelerație tangențială (tangențială):
Accelerație normală:
.
;
.
Vector unitarîn direcția normalei principale a traiectoriei:
.
Raza de curbură a traiectoriei:
.
Centrul de curbură al traseului:
.
.
Exemplu de rezolvare a problemei
Determinarea vitezei și accelerației unui punct în funcție de ecuațiile date ale mișcării sale
Conform ecuațiilor de mișcare date ale unui punct, stabiliți tipul traiectoriei acestuia și pentru momentul de timp găsiți poziția punctului pe traiectorie, viteza acestuia, accelerațiile complete, tangențiale și normale, precum și raza de curbură. a traiectoriei.
Ecuații de mișcare punctuală:
, cm;
, cm.
Soluţie
Determinarea tipului de traiectorie
Excludem timpul din ecuațiile mișcării. Pentru a face acest lucru, le rescriem sub forma:
;
.
Să aplicăm formula:
.
;
;
;
.
Deci, avem ecuația traiectoriei:
.
Aceasta este ecuația unei parabole cu un vârf într-un punct și o axă de simetrie.
În măsura în care
, apoi
; sau
.
În mod similar, obținem o constrângere pentru coordonată:
;
;
Astfel, traiectoria punctului este arcul parabolei
,
situat la
Și .
Construim o parabolă din puncte.
| 0 | 6 |
| 3 | 5,625 |
| 6 | 4,5 |
| nouă | 2,625 |
| 12 | 0 |
Determinați poziția punctului în timp.
;
.
Determinarea vitezei unui punct
Diferențiând coordonatele și în funcție de timp, găsim componentele vitezei.
.
Pentru diferențiere, este convenabil să aplicați formula de trigonometrie:
. Apoi
;
.
Calculăm valorile componentelor vitezei în momentul de timp:
;
.
Modul de viteza:
.
Determinarea accelerației unui punct
Prin diferențierea componentelor vitezei și în raport cu timpul, găsim componentele accelerației punctului.
;
.
Calculați valorile componentelor accelerației în timp:
;
.
Modul de accelerare:
.
Accelerația tangențială este proiecția accelerației totale pe direcția vitezei:
.
Deoarece , atunci vectorul de accelerație tangențială este îndreptat opus vitezei .
Accelerație normală:
.
Vectorul și este îndreptat spre centrul de curbură al traiectoriei.
Raza de curbură a traiectoriei:
.
Traiectoria punctului este arcul parabolei
;
.
Viteza punctului: .
Accelerație punctuală: ; ; .
Raza de curbură a traiectoriei: .
Definiţia other quantities
Când am rezolvat problema, am găsit:
vector și modul de viteză:
;
;
vector și modulul de accelerație total:
;
;
accelerații tangențiale și normale:
;
;
raza de curbură a traiectoriei: .
Să definim cantitățile rămase.
Vector unitar în direcția tangentei drumului:
.
Vector de accelerație tangențială:
.
Vector de accelerație normală:
.
Vector unitar în direcția normalei principale:
.
Coordonatele centrului de curbură al traiectoriei:
.
Să introducem a treia axă a sistemului de coordonate perpendicular pe axele și . Într-un sistem 3D
;
.
Vector unitar în direcție binormală:
.
Mișcarea unui punct în spațiu poate fi considerată dată dacă se cunosc legile schimbării celor trei coordonate carteziene ale sale x, y, z în funcție de timp. Cu toate acestea, în unele cazuri de mișcare spațială a punctelor materiale (de exemplu, în zone suprafete limitate diferite forme), utilizarea ecuațiilor de mișcare în coordonate carteziene este incomod, deoarece devin prea greoaie. În astfel de cazuri, se pot alege alți trei parametri scalari independenți $q_1,(\ q)_2,\ \ q_3$, numiți coordonate curbilinii sau generalizate, care, de asemenea, determină în mod unic poziția unui punct în spațiu.
Viteza punctului M la specificarea mișcării sale în coordonate curbilinie este determinată în formă suma vectoriala componentele vitezei paralele cu axele de coordonate:
\[\overrightarrow(v)=\frac(d\overrightarrow(r))(dt)=\frac(\partial \overrightarrow(r))(\partial q_1)\dot(q_1)+\frac(\partial \ overrightarrow(r))(\partial q_2)\dot(q_2)+\frac(\partial \overrightarrow(r))(\partial q_3)\dot(q_3)=v_(q_1)\overline(e_1)+v_( q_2)\overline(e_2)\+v_(q_3)\overline(e_3)\]
Proiecțiile vectorului viteză pe axele de coordonate corespunzătoare sunt: $v_(q_i)=\overline(v\ )\cdot \overline(e_i)=H_i\dot(q_i)\ \ ,\ \ i=\overline(1 ,3)$
Aici $H_i=\left|(\left(\frac(\partial \overrightarrow(r))(\partial q_i)\right))_M\right|$ este parametrul numit i-lea coeficient Lame și este egală cu modulul derivatei parțiale a vectorului rază a punctului de-a lungul coordonatei curbilinii i-a calculată în punctul dat M. Fiecare dintre vectorii $\overline(e_i)$ are o direcție corespunzătoare direcției de mişcare a punctului final al vectorului rază $r_i$ at i-a coordonate generalizate. Modulul de viteză într-un sistem de coordonate curbiliniu ortogonal poate fi calculat din dependența:
În formulele de mai sus, valorile derivatelor și coeficienților Lame sunt calculate pentru poziția curentă a punctului M în spațiu.
Coordonatele unui punct din sistemul de coordonate sferice sunt parametrii scalari r, $(\mathbf \varphi ),\ (\mathbf \theta )$ numărați așa cum se arată în Fig. unu.
Figura 1. Vector viteză în coordonate sferice
Sistemul de ecuații de mișcare a unui punct are în acest caz forma:
\[\left\( \begin(array)(c) r=r(t) \\ \varphi =\varphi (t \\ \theta =\theta (t \end(array) \right.\]
Pe fig. Figura 1 prezintă vectorul rază r tras de la origine, unghiurile $(\mathbf \varphi )$ și $(\mathbf \theta )$, precum și liniile de coordonate și axele sistemului considerat într-un punct arbitrar M al traiectoria. Se poate observa că liniile de coordonate $((\mathbf \varphi ))$ și $((\mathbf \theta ))$ se află pe suprafața unei sfere cu raza r. Acest sistem de coordonate curbiliniu este, de asemenea, ortogonal. coordonate carteziene poate fi exprimat în termeni de coordonate sferice după cum urmează:
Apoi coeficienții Lame: $H_r=1;\ \ H_(\varphi )=rsin\varphi ;\ \ H_0=r$ ; proiectii ale vitezei punctului pe axele sistemului de coordonate sferice $v_r=\dot(r\ \ );$ $v_(\theta )=r\dot(\theta )$; $\ v_(\varphi )=r\dot(\varphi )sin\theta $ și modulul vectorului viteză
Accelerația unui punct într-un sistem de coordonate sferice
\[\overrightarrow(a)=a_r(\overrightarrow(e))_r+a_(\varphi )(\overrightarrow(e))_(\varphi )+a_(\theta )(\overrightarrow(e))_( \theta ),\]
proiectii ale acceleratiei unui punct pe axele sistemului de coordonate sferice
\ \
Modulul de accelerare $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))$
Sarcina 1
Punctul se deplasează de-a lungul liniei de intersecție a sferei și a cilindrului conform ecuațiilor: r = R, $\varphi $ = kt/2, $\theta $ = kt/2 , (r, $\varphi $, $ \theta $ --- sferic coordonate). Aflați modulul și proiecțiile vitezei unui punct pe axele sistemului de coordonate sferice.
Să găsim proiecțiile vectorului viteză pe axele coordonatelor sferice:
Modulul de viteză $v=\sqrt(v^2_r+v^2_(\varphi )+v^2_(\theta ))=R\frac(k)(2)\sqrt((sin)^2\frac(kt )(2)+1)$
Sarcina 2
Folosind condiția problemei 1, determinați modulul de accelerare punct.
Să găsim proiecțiile vectorului de accelerație pe axele coordonatelor sferice:
\ \ \
Modulul de accelerare $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))=R\frac(k^2)(4)\sqrt(4+(sin)^2 \frac(kt)(2))$