compiti di movimento
Usiamo l'equazione (4) e prendiamo la sua derivata rispetto al tempo
In (8), con vettori unitari, ci sono proiezioni del vettore velocità su assi coordinati
Le proiezioni di velocità sugli assi delle coordinate sono definite come le prime derivate temporali delle coordinate corrispondenti.
Conoscendo le proiezioni, si può trovare modulo vettoriale e la sua direzione
 ,
(10)
,
(10)
Determinazione della velocità in modo naturale
compiti di movimento
Sia data la traiettoria di un punto materiale e la legge di variazione della coordinata curvilinea. Supponiamo a t 1 punto aveva  e la coordinata S 1, mentre t 2 - coordinare S 2. In occasione
e la coordinata S 1, mentre t 2 - coordinare S 2. In occasione
 la coordinata è stata incrementata
la coordinata è stata incrementata  , poi velocità media punti
, poi velocità media punti
 .
.
Per trovare la velocità in un dato momento, si passa al limite
 ,
,
 .
(12)
.
(12)
Il vettore di velocità di un punto nel modo naturale di specificare il movimento è definito come la prima derivata temporale della coordinata curvilinea.
accelerazione puntiforme
Sotto l'accelerazione di un punto materiale comprendere una quantità vettoriale che caratterizza la velocità di variazione del vettore velocità di un punto in grandezza e direzione nel tempo.
Accelerazione di un punto con il metodo vettoriale per specificare il movimento
Considera un punto in due punti nel tempo t 1
( ) e t 2
(
) e t 2
( ), poi
), poi  - incremento di tempo
- incremento di tempo  - incremento di velocità.
- incremento di velocità.
Vettore  giace sempre nel piano del movimento ed è diretto verso la concavità della traiettoria.
giace sempre nel piano del movimento ed è diretto verso la concavità della traiettoria.
P 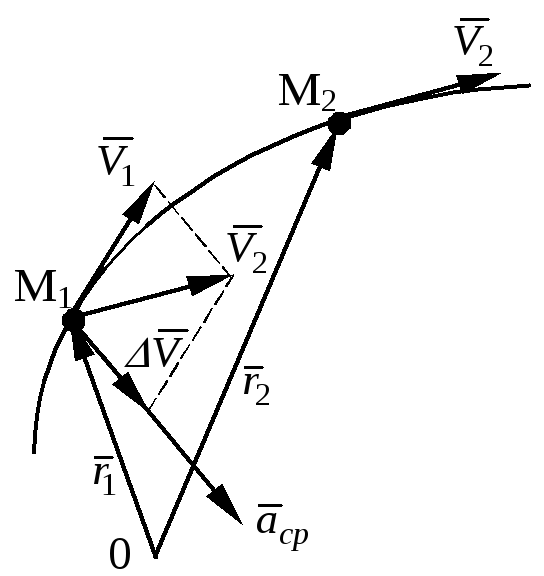 uno accelerazione del punto medio in occasione
t
capire la grandezza
uno accelerazione del punto medio in occasione
t
capire la grandezza
 .
(13)
.
(13)
Per trovare l'accelerazione in un dato momento, si passa al limite
 ,
,
 .
(14)
.
(14)
L'accelerazione di un punto in un dato momento è definita come la seconda derivata temporale del vettore raggio del punto o la prima derivata temporale del vettore velocità.
Il vettore di accelerazione si trova nel piano contiguo ed è diretto verso la concavità della traiettoria.
Accelerazione di un punto con il metodo delle coordinate per specificare il movimento
Usiamo l'equazione di connessione tra il vettore e il metodo delle coordinate per specificare il movimento
E prendine la seconda derivata
 ,
,
 .
(15)
.
(15)
Nell'equazione (15), con i vettori unitari, ci sono proiezioni del vettore di accelerazione sugli assi delle coordinate
 .
(16)
.
(16)
Le proiezioni di accelerazione sugli assi delle coordinate sono definite come le prime derivate temporali delle proiezioni di velocità o come le seconde derivate temporali delle coordinate corrispondenti.
Il modulo e la direzione del vettore di accelerazione possono essere trovati dalle seguenti espressioni
 ,
(17)
,
(17)
 ,
,
 ,
, .
(18)
.
(18)
Accelerazione di un punto con un modo naturale di specificare il movimento
P  Lascia che il punto si muova lungo una traiettoria curvilinea. Considera due delle sue posizioni negli istanti di tempo t
(S, M, v) e t 1
(S 1, M1, v 1).
Lascia che il punto si muova lungo una traiettoria curvilinea. Considera due delle sue posizioni negli istanti di tempo t
(S, M, v) e t 1
(S 1, M1, v 1).
In questo caso, l'accelerazione è determinata attraverso le sue proiezioni sugli assi del sistema di coordinate naturali che si muovono insieme al punto M. Gli assi sono diretti come segue:
M - tangente, diretta lungo la tangente alla traiettoria, verso il riferimento positivo della distanza,
M n- la normale principale, diretta lungo la normale giacente sul piano contiguo, e diretta verso la concavità della traiettoria,
M bè il binormale, perpendicolare al piano M n e forma una tripla destra con i primi assi.
Poiché il vettore di accelerazione giace su un piano contiguo, allora un b = 0. Troviamo le proiezioni dell'accelerazione su altri assi.
 .
(19)
.
(19)
Proiettiamo la (19) sugli assi delle coordinate
 ,
(20)
,
(20)
 .
(21)
.
(21)
Disegna attraverso il punto M 1 asse parallela agli assi nel punto M e trova le proiezioni di velocità:
dove - il cosiddetto angolo di adiacenza.
Sostituisci (22) in (20)
 .
.
In t 0 0, cos 1 quindi

 .
(23)
.
(23)
L'accelerazione tangenziale di un punto è determinata dalla prima derivata temporale della velocità o dalla seconda derivata temporale della coordinata curvilinea.
L'accelerazione tangenziale caratterizza la variazione in magnitudine del vettore velocità.
Sostituisci (22) in (21)
 .
.
Moltiplica numeratore e denominatore per s per conoscere i limiti
dove  (primo limite notevole),
(primo limite notevole),
 ,
, ,
,
 , dove
- raggio di curvatura della traiettoria.
, dove
- raggio di curvatura della traiettoria.
Sostituendo i limiti calcolati nella (24), otteniamo
 .
(25)
.
(25)
L'accelerazione normale di un punto è determinata dal rapporto tra il quadrato della velocità e il raggio di curvatura della traiettoria nel punto dato.
L'accelerazione normale caratterizza la variazione del vettore velocità nella direzione ed è sempre diretta verso la concavità della traiettoria.
Infine si ottengono le proiezioni dell'accelerazione del punto materiale sugli assi del sistema di coordinate naturali e il modulo del vettore

 ,
(26)
,
(26)
 .
(27)
.
(27)
Formule per calcolare la velocità di un punto, l'accelerazione, il raggio di curvatura della traiettoria, tangente, normale e binormale secondo le date dipendenze delle coordinate dal tempo. Un esempio di risoluzione di un problema in cui date equazioni movimento, è necessario determinare la velocità e l'accelerazione del punto. Vengono anche determinati i raggi di curvatura della traiettoria, tangente, normale e binormale.
Contenutointroduzione
Le conclusioni delle formule seguenti e la presentazione della teoria sono riportate alla pagina “Cinematica di un punto materiale”. Qui applichiamo i risultati principali di questa teoria al metodo delle coordinate per specificare il movimento di un punto materiale.
Supponiamo di avere un sistema di coordinate rettangolare fisso centrato su Punto fisso. In questo caso, la posizione del punto M è determinata in modo univoco dalle sue coordinate (x, y, z). Coordinare modo di impostazione movimento del punto
- questo è un metodo in cui vengono fornite le dipendenze delle coordinate dal tempo. Cioè, sono date tre funzioni del tempo (per il movimento tridimensionale):
Definizione di grandezze cinematiche
Conoscendo la dipendenza delle coordinate dal tempo, determiniamo automaticamente il vettore raggio del punto materiale M con la formula:
,
dove sono i vettori unitari (orth) nella direzione degli assi x, y, z.
Differenziando rispetto al tempo, troviamo le proiezioni di velocità e accelerazione sugli assi delle coordinate:
;
;
Moduli di velocità e accelerazione:
;
.
.
L'accelerazione tangenziale (tangenziale) è una proiezione piena accelerazione alla direzione della velocità:
.
Vettore dell'accelerazione tangenziale (tangenziale):
Accelerazione normale:
.
;
.
Vettore unitario in direzione della normale principale della traiettoria:
.
Il raggio di curvatura della traiettoria:
.
Centro di curvatura del percorso:
.
.
Esempio di soluzione del problema
Determinazione della velocità e dell'accelerazione di un punto secondo le equazioni date del suo moto
Secondo le equazioni di moto date di un punto, stabilisci il tipo della sua traiettoria e per il momento trova la posizione del punto sulla traiettoria, la sua velocità, piena, tangente e normale accelerazione, nonché il raggio di curvatura della traiettoria.
Equazioni del moto dei punti:
, centimetro;
, centimetro.
Soluzione
Determinazione del tipo di traiettoria
Escludiamo il tempo dalle equazioni del moto. Per fare ciò, li riscriviamo nella forma:
;
.
Applichiamo la formula:
.
;
;
;
.
Quindi, abbiamo l'equazione della traiettoria:
.
Questa è l'equazione di una parabola con un vertice in un punto e un asse di simmetria.
Perché il
, poi
; o
.
Allo stesso modo, otteniamo un vincolo per la coordinata:
;
;
Pertanto, la traiettoria del punto è l'arco della parabola
,
situato in
e .
Costruiamo una parabola da punti.
| 0 | 6 |
| 3 | 5,625 |
| 6 | 4,5 |
| 9 | 2,625 |
| 12 | 0 |
Determina la posizione del punto nel tempo.
;
.
Determinazione della velocità di un punto
Differenziando le coordinate e rispetto al tempo, troviamo le componenti della velocità.
.
Per differenziare, è conveniente applicare la formula della trigonometria:
. Quindi
;
.
Calcoliamo i valori delle componenti di velocità al momento:
;
.
Modulo di velocità:
.
Determinazione dell'accelerazione di un punto
Differenziando le componenti di velocità e rispetto al tempo, troviamo le componenti di accelerazione del punto.
;
.
Calcola i valori delle componenti di accelerazione al momento:
;
.
Modulo di accelerazione:
.
L'accelerazione tangenziale è la proiezione dell'accelerazione totale sulla direzione della velocità:
.
Poiché, allora il vettore dell'accelerazione tangenziale è diretto opposto alla velocità.
Accelerazione normale:
.
Il vettore ed è diretto verso il centro di curvatura della traiettoria.
Il raggio di curvatura della traiettoria:
.
La traiettoria del punto è l'arco della parabola
;
.
Velocità di punta: .
Accelerazione puntuale: ; ; .
Il raggio di curvatura della traiettoria: .
Definizione di altre grandezze
Risolvendo il problema, abbiamo riscontrato:
vettore e modulo di velocità:
;
;
vettore e modulo di accelerazione totale:
;
;
accelerazioni tangenziali e normali:
;
;
raggio di curvatura della traiettoria: .
Definiamo le quantità rimanenti.
Vettore unitario in direzione della tangente alla traiettoria:
.
Vettore di accelerazione tangenziale:
.
Vettore di accelerazione normale:
.
Vettore unitario nella direzione della normale principale:
.
Coordinate del centro di curvatura della traiettoria:
.
Introduciamo il terzo asse del sistema di coordinate perpendicolare agli assi e . In un sistema 3D
;
.
Vettore unitario in direzione binormale:
.
Il movimento di un punto nello spazio si può considerare dato se si conoscono le leggi di variazione delle sue tre coordinate cartesiane x, y, z in funzione del tempo. Tuttavia, in alcuni casi di movimento spaziale di punti materiali (ad esempio, in aree superfici limitate varie forme), l'uso delle equazioni del moto in coordinate cartesiane è scomodo, poiché diventano troppo ingombranti. In questi casi, si possono scegliere altri tre parametri scalari indipendenti $q_1,(\ q)_2,\ \ q_3$, detti coordinate curvilinee o generalizzate, che determinano anche in modo univoco la posizione di un punto nello spazio.
La velocità del punto M quando si specifica il suo movimento in coordinate curvilinee è determinata nel modulo somma vettoriale componenti di velocità parallele agli assi delle coordinate:
\[\overrightarrow(v)=\frac(d\overrightarrow(r))(dt)=\frac(\partial \overrightarrow(r))(\partial q_1)\dot(q_1)+\frac(\partial \ overrightarrow(r))(\parziale q_2)\punto(q_2)+\frac(\parziale \overrightarrow(r))(\parziale q_3)\punto(q_3)=v_(q_1)\overline(e_1)+v_( q_2)\overline(e_2)\+v_(q_3)\overline(e_3)\]
Le proiezioni del vettore velocità sugli assi delle coordinate corrispondenti sono: $v_(q_i)=\overline(v\ )\cdot \overline(e_i)=H_i\dot(q_i)\ \ ,\ \ i=\overline(1 ,3)$
Qui $H_i=\left|(\left(\frac(\partial \overrightarrow(r))(\partial q_i)\right))_M\right|$ è il parametro chiamato i-esimo coefficiente Lame ed è uguale al modulo della derivata parziale del vettore raggio del punto lungo l'i-esima coordinata curvilinea calcolata nel punto M dato. Ciascuno dei vettori $\overline(e_i)$ ha una direzione corrispondente alla direzione di movimento del punto finale del vettore raggio $r_i$ at i-esimo coordinata generalizzata. Il modulo di velocità in un sistema di coordinate curvilinee ortogonali può essere calcolato dalla dipendenza:
Nelle formule di cui sopra, i valori delle derivate e dei coefficienti di Lame sono calcolati per la posizione attuale del punto M nello spazio.
Le coordinate di un punto nel sistema di coordinate sferiche sono i parametri scalari r, $(\mathbf \varphi ),\ (\mathbf \theta )$ contati come mostrato in Fig. uno.
Figura 1. Vettore di velocità in coordinate sferiche
Il sistema di equazioni del moto di un punto in questo caso ha la forma:
\[\left\( \begin(array)(c) r=r(t) \\ \varphi =\varphi (t \\ \theta =\theta (t \end(array) \right.\]
Sulla fig. La figura 1 mostra il vettore raggio r disegnato dall'origine, gli angoli $(\mathbf \varphi )$ e $(\mathbf \theta )$, nonché le linee di coordinate e gli assi del sistema considerato in un punto arbitrario M di la traiettoria. Si può vedere che le linee di coordinate $((\mathbf \varphi ))$ e $((\mathbf \theta ))$ giacciono sulla superficie di una sfera di raggio r. Questo sistema di coordinate curvilinee è anche ortogonale. coordinate cartesiane può essere espresso in termini di coordinate sferiche come segue:
Quindi i coefficienti di Lame: $H_r=1;\ \ H_(\varphi )=rsin\varphi ;\ \ H_0=r$ ; proiezioni della velocità del punto sugli assi del sistema di coordinate sferiche $v_r=\dot(r\ \ );$ $v_(\theta )=r\dot(\theta )$; $\ v_(\varphi )=r\dot(\varphi )sin\theta $, e il modulo del vettore velocità
Accelerazione di un punto in un sistema di coordinate sferiche
\[\overrightarrow(a)=a_r(\overrightarrow(e))_r+a_(\varphi )(\overrightarrow(e))_(\varphi )+a_(\theta )(\overrightarrow(e))_( \theta ),\]
proiezioni dell'accelerazione di un punto sugli assi del sistema di coordinate sferiche
\ \
Modulo di accelerazione $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))$
Compito 1
Il punto si muove lungo la linea di intersezione della sfera e del cilindro secondo le equazioni: r = R, $\varphi $ = kt/2, $\theta $ = kt/2 , (r, $\varphi $, $ \teta $ --- sferico coordinate). Trova il modulo e le proiezioni della velocità di un punto sugli assi del sistema di coordinate sferiche.
Troviamo le proiezioni del vettore velocità sugli assi di coordinate sferiche:
Modulo di velocità $v=\sqrt(v^2_r+v^2_(\varphi )+v^2_(\theta ))=R\frac(k)(2)\sqrt((sin)^2\frac(kt )(2)+1)$
Compito 2
Utilizzando la condizione del problema 1, determinare il modulo di accelerazione del punto.
Troviamo le proiezioni del vettore di accelerazione sugli assi delle coordinate sferiche:
\ \ \
Modulo di accelerazione $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))=R\frac(k^2)(4)\sqrt(4+(sin)^2 \frac(kt)(2))$