I principali, tre assi tra loro perpendicolari tracciati attraverso il c.-l. punto del corpo e possedendo la proprietà che, se presi come assi coordinati, i momenti di inerzia centrifuga del corpo attorno a questi assi saranno uguali a zero. Se tv. un corpo fissato in un punto viene portato in rotazione attorno ad un asse, che in un dato punto è yavl. le principali O. e., quindi il corpo, in assenza di forze esterne, continuerà a ruotare attorno a questo asse, come attorno ad uno fisso. Il concetto di O. e. gioca ruolo importante nell'altoparlante della TV corpo.
Fisico dizionario enciclopedico. - M.: Enciclopedia sovietica..1983 .
ASSE DI INERZIA
I principali sono tre assi reciprocamente perpendicolari disegnati attraverso il dottorato di ricerca. punto del corpo, coincidente con gli assi dell'ellissoide di inerzia del corpo a questo punto. Principale O. e. hanno la proprietà che se sono presi come assi coordinati, i momenti di inerzia centrifuga del corpo attorno a questi assi saranno uguali a zero. Se uno degli assi delle coordinate, ad es. asse Oh,è per punto DI il principale O. e., quindi i momenti d'inerzia centrifughi, i cui indici includono il nome di questo asse, cioè Issi e io xz, sono uguali a zero. Se un corpo solido, fissato in un punto, viene portato in rotazione attorno ad un asse, lo spigolo in un dato punto è il principale O. e., quindi il corpo in assenza di esterno. le forze continueranno a ruotare attorno a questo asse, come attorno a un asse fisso.
Enciclopedia fisica. In 5 volumi. - M.: Enciclopedia sovietica.Il caporedattore A. M. Prokhorov.1988 .
Assi, rispetto ai quali momento centrifugo di inerzia è zero, sono chiamati principali e i momenti di inerzia attorno a questi assi sono chiamati momenti di inerzia principali.
Riscriviamo la formula (2.18) tenendo conto delle note relazioni trigonometriche:
; ![]()
in questa forma
Per determinare la posizione degli assi centrali principali, differenziamo l'uguaglianza (2.21) rispetto all'angolo α una volta ottenuta
Ad un certo valore dell'angolo α=α 0 , il momento d'inerzia centrifugo potrebbe risultare zero. Pertanto, tenendo conto del derivato ( in), il momento di inerzia assiale assumerà un valore estremo. Uguagliare
![]() ,
,
otteniamo una formula per determinare la posizione degli assi di inerzia principali nella forma:
![]() (2.22)
(2.22)
Nella formula (2.21), togliamo cos2 tra parentesi α
0 e sostituisci il valore (2.22) lì e, tenendo conto della ben nota dipendenza trigonometrica ![]() noi abbiamo:
noi abbiamo:

Dopo la semplificazione, otteniamo finalmente una formula per determinare i valori dei principali momenti di inerzia:
![]() (2.23)
(2.23)
La formula (20.1) viene utilizzata per determinare i momenti di inerzia attorno agli assi principali. La formula (2.22) non fornisce una risposta diretta alla domanda su quale asse il momento di inerzia sarà massimo o minimo. Per analogia con la teoria dello studio di uno stato di sollecitazione piano, presentiamo formule più convenienti per determinare la posizione dei principali assi di inerzia:
![]() (2.24)
(2.24)
Qui α 1 e α 2 determinano la posizione degli assi, rispetto ai quali i momenti di inerzia sono rispettivamente uguali J 1 e J 2. In questo caso va tenuto presente che la somma dei moduli degli angoli α 01 e α 02 deve essere uguale a π/2:
La condizione (2.24) è la condizione di ortogonalità per i principali assi di inerzia di una sezione piana.
Va notato che quando si utilizzano le formule (2.22) e (2.24) per determinare la posizione degli assi di inerzia principali, è necessario osservare il seguente schema:
L'asse principale, rispetto al quale il momento di inerzia è massimo, forma l'angolo più piccolo con l'asse originale, rispetto al quale il momento di inerzia è maggiore.
Esempio 2.2.
Determinare le caratteristiche geometriche delle sezioni piane della trave rispetto agli assi centrali principali:
 |
Soluzione
La sezione proposta è asimmetrica. Pertanto, la posizione degli assi centrali sarà determinata da due coordinate, gli assi centrali principali verranno ruotati rispetto agli assi centrali di un certo angolo. Ciò implica un tale algoritmo per risolvere il problema della determinazione delle principali caratteristiche geometriche.
1. Dividiamo la sezione in due rettangoli con tali aree e momenti di inerzia attorno ai propri assi centrali:
F 1 \u003d 12 cm 2, F 2 \u003d 18 cm 2;
![]()
![]()
![]()
![]()
![]()
2. Impostiamo il sistema degli assi ausiliari X 0 a 0 a partire dal punto MA. Le coordinate dei centri di gravità dei rettangoli in questo sistema di assi sono le seguenti:
X 1 = 4 cm; X 2 = 1 cm; a 1 \u003d 1,5 cm; a 2 \u003d 4,5 cm.
3. Determinare le coordinate del baricentro della sezione secondo le formule (2.4):
Applichiamo gli assi centrali (in rosso in Fig. 2.9).
4. Calcoliamo i momenti d'inerzia assiale e centrifugo rispetto agli assi centrali X con e a c secondo le formule (2.13) applicate ad una sezione composta:
5. Troviamo i principali momenti di inerzia secondo la formula (2.23)
6. Determinare la posizione dei principali assi centrali di inerzia X e a per formula (2.24):
Gli assi centrali principali sono mostrati in (Fig. 2.9) in blu.
7. Verifichiamo i calcoli eseguiti. Per fare ciò, eseguiremo i seguenti calcoli:
La somma dei momenti d'inerzia assiali rispetto all'asse centrale e centrale principale deve essere la stessa:
La somma dei moduli degli angoli α X e α si,, definendo la posizione degli assi centrali principali:
Inoltre, la disposizione che l'asse centrale principale X, rispetto al quale il momento di inerzia Jx Esso ha valore massimo, forma un angolo minore con l'asse centrale, rispetto al quale è maggiore il momento di inerzia, cioè con asse X da.
Principali assi d'inerzia e principali momenti d'inerzia.
Quando l'angolo cambia, cambiano i valori di Ix1, Iy1 e Ix1y1. Trova il valore dell'angolo a cui Ix1 e Iy1 hanno valori estremi; per fare ciò prendiamo la derivata prima rispetto a Ix1 o Iy1 e la poniamo uguale a zero: o da dove (1.28)
Questa formula determina la posizione di due assi, rispetto a uno dei quali il momento di inerzia assiale è massimo e rispetto all'altro è minimo.
Tali assi sono detti principali. I momenti d'inerzia intorno agli assi principali sono detti momenti d'inerzia principali.
Troviamo i valori dei principali momenti di inerzia dalle formule (1.23) e (1.24), sostituendoli dalla formula (1.28), mentre utilizziamo le note formule trigonometriche per le funzioni dei doppi angoli.
Dopo le trasformazioni, otteniamo la seguente formula per determinare i principali momenti di inerzia: (1.29)
Esaminando la derivata seconda, si può stabilire che per questo caso (Ix< Iy) максимальный момент инерции Imax имеет место относительно главной оси, повернутой на угол по отношению к оси х, а минимальный момент инерции - относительно другой, перпендикулярной оси. В большинстве случаев в этом исследовании нет надобности, так как по конфигурации сечений видно, какая из главных осей соответствует максимуму момента инерции.
Gli assi principali passanti per il baricentro della sezione sono detti assi centrali principali.
In molti casi è possibile determinare immediatamente la posizione degli assi centrali principali. Se la figura ha un asse di simmetria, allora è uno degli assi centrali principali, il secondo passa per il baricentro della sezione perpendicolare al primo. Quanto precede deriva dal fatto che rispetto all'asse di simmetria ea qualsiasi asse ad esso perpendicolare il momento d'inerzia centrifugo è uguale a zero.
Se i due principali momenti di inerzia centrali della sezione sono uguali tra loro, per questa sezione qualsiasi asse centrale è quello principale e tutti i principali momenti di inerzia centrali sono uguali (cerchio, quadrato, esagono, esagono equilatero) .
9. Caratteristiche geometriche di base delle sezioni
Qui: C- baricentro delle sezioni piane;
UN- area della sezione trasversale;
io X , IO y- momenti d'inerzia assiali della sezione rispetto agli assi principali;
io xI , IO si- momenti di inerzia assiali relativi agli assi ausiliari;
io P- momento d'inerzia polare della sezione;
w X , W y- momenti di resistenza assiali;
w P- momento polare di resistenza
Sezione rettangolare


Sezione trasversale di un triangolo isoscele

10. I principali tipi di forze che agiscono sul corpo. Momento di forza attorno al centro. Proprietà del momento.
Quando si considerano i problemi meccanici, la maggior parte delle forze che agiscono sui corpi possono essere attribuite a tre varietà principali:
La forza di gravità;
Forza di attrito;
Forza elastica.
Tutti i corpi intorno a noi sono attratti dalla Terra, questo è dovuto all'azione delle forze di gravitazione universale. Se trascuriamo la resistenza dell'aria, sappiamo già che tutti i corpi cadono sulla Terra con la stessa accelerazione: l'accelerazione della caduta libera.
Come ogni oggetto, un corpo sospeso su una molla tende a cadere a causa della gravità della Terra, ma quando la molla si allunga per una certa lunghezza il corpo si ferma, cioè si trova in uno stato di equilibrio meccanico. Sappiamo già che l'equilibrio meccanico si verifica quando la somma delle forze agenti sul corpo è zero. Ciò significa che la forza di gravità che agisce sul carico deve bilanciarsi con una certa forza che agisce dal lato della molla. Questa forza, diretta contro la forza di gravità e che agisce dal lato della molla, è chiamata forza elastica.
Dopo aver superato una certa distanza, il corpo si ferma, la velocità del corpo diminuisce dal valore iniziale a zero, ovvero l'accelerazione del corpo è un valore negativo. Di conseguenza, una forza agisce sul corpo dal lato della superficie, che tende a fermare questo corpo, cioè agisce contro la sua velocità. Questa forza è chiamata forza di attrito.
Momento di forza attorno al centro (punto).
Momento di forza F rispetto al centro (punto) DI chiamato vettore m o (F) pari prodotto vettoriale raggio del vettore R disegnato dal centro DI Esattamente MA applicazione della forza, sul vettore della forza F: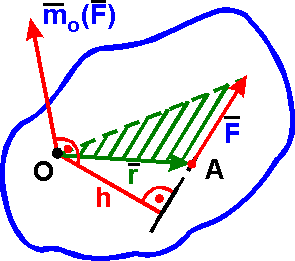
dove la spalla h è una perpendicolare caduta dal centro DI alla linea di forza F.
Momento m o (F) caratterizza l'effetto rotatorio della forza F rispetto al centro (punto) DI.
Proprietà del momento di forza:
1. Momento di forza attorno al centro non cambia durante il trasferimento di potenza lungo la linea d'azione in qualsiasi punto;
2. Se linea d'azione la forza passa attraverso il centro DI(h = 0), quindi il momento di forza attorno al centro DI zero.
Se un corpo viene portato in rotazione attorno a un asse arbitrario e poi lasciato a se stesso, la posizione dell'asse di rotazione nello spazio, in generale, cambierà: l'asse ruoterà o si sposterà rispetto al sistema di riferimento inerziale. Per mantenere un asse preso arbitrariamente in una posizione costante, è necessario applicargli determinate forze.
L'asse di rotazione del corpo, la cui posizione nello spazio viene mantenuta senza l'applicazione di forze dall'esterno, è chiamato asse libero corpo.
Si può dimostrare che ci sono almeno tre assi tra loro perpendicolari che passano per il centro di massa del corpo, che possono fungere da assi liberi. Tali assi sono chiamati principali assi di inerzia corpo.
Si chiamano i momenti di inerzia di un corpo rispetto agli assi principali principali momenti di inerzia.
Per i corpi con simmetria assiale (ad esempio un cilindro omogeneo), uno degli assi principali coincide con l'asse di simmetria e due assi qualsiasi perpendicolari all'asse di simmetria e tra loro e passanti per il centro di massa del corpo sono anche i principali (Fig. 7.15) . I momenti di inerzia attorno agli ultimi due assi sono uguali tra loro e il momento di inerzia attorno all'asse di simmetria è diverso da loro
Un tale corpo è chiamato parte superiore simmetrica.

Riso. 7.15. Assi principali di un cilindro omogeneo
Per un corpo con simmetria centrale (ad esempio, per una palla omogenea), sono principali tre assi tra loro perpendicolari che passano per il centro di simmetria. Per loro
Tali corpi sono chiamati cime di palla. Qualsiasi asse di una sommità sferica passante per il centro di simmetria è principale (e, quindi, libero).
Nel caso generale, i principali momenti di inerzia del corpo sono diversi, cioè
Un tale corpo è chiamato cima asimmetrica. Un esempio di piano asimmetrico è un parallelepipedo rettangolare omogeneo (Fig. 7.16).

Riso. 7.16. Assi principali di un parallelepipedo omogeneo
Con una rotazione "quasi" libera, piccole perturbazioni possono agire sul corpo. Se, sotto tali perturbazioni, l'asse di rotazione cambia poco la sua posizione, viene chiamata la rotazione sostenibile. Altrimenti parlane instabile rotazione.
Sia, per certezza, la seguente relazione tra i principali momenti di inerzia vale per una cima asimmetrica:
Si può dimostrare che la rotazione attorno agli assi 1 e 3 (ovvero gli assi con momenti di inerzia massimi e minimi) sarà stabile e attorno all'asse 2 (con un momento di inerzia intermedio) - instabile.
Video 7.4. Stabilità del volo nell'aria cuboide
Lascia che il corpo ruoti attorno a uno degli assi principali, ad esempio attorno all'asse z. Poi il vettore velocità angolare ha la forma
Momenti d'inerzia assiali della sezione sugli assi X e a(vedi fig. 32, ma) sono detti integrali definiti della forma
Quando si determinano i momenti d'inerzia assiali, in alcuni casi si deve incontrare un'altra nuova caratteristica geometrica della sezione: il momento d'inerzia centrifugo.
momento d'inerzia centrifugo sezioni attorno a due assi reciprocamente perpendicolari x y(vedi fig. 32, ma)
Momento d'inerzia polare sezione relativa all'origine DI(vedi fig. 32, ma) chiamata integrale definito tipo
dove R- distanza dall'origine delle coordinate all'area elementare d.A.
I momenti di inerzia assiale e polare sono sempre positivi e il momento centrifugo, a seconda della scelta degli assi, può essere positivo, negativo o uguale a zero. Unità di designazione dei momenti di inerzia - cm 4, mm 4.
Esiste la seguente relazione tra i momenti di inerzia polari e assiali:

Secondo la formula (41), la somma dei momenti di inerzia assiali attorno a due assi reciprocamente perpendicolari è uguale al momento di inerzia polare attorno al punto di intersezione di questi assi (l'origine).
I momenti di inerzia delle sezioni relative a assi paralleli, alcuni dei quali centrali (x s, noi)> sono determinati dalle espressioni: 
dove e iv- coordinate del baricentro C della sezione (Fig. 34).
Formule (42) con grande uso pratico, si leggono come segue: il momento d'inerzia di una sezione attorno a un qualsiasi asse è uguale al momento d'inerzia attorno a un asse ad esso parallelo e passante per il baricentro della sezione, più il prodotto dell'area della sezione per il quadrato della distanza tra gli assi.
Nota: coordinate a e c dovrebbero essere sostituiti nelle formule (42) sopra riportate, tenendo conto dei loro segni.

Riso. 34.
Dalle formule (42) segue che di tutti i momenti di inerzia attorno ad assi paralleli, il momento più piccolo sarà attorno all'asse passante per il baricentro della sezione, cioè il momento di inerzia centrale.
Le formule per determinare la resistenza e la rigidità di una struttura includono momenti di inerzia, che sono calcolati rispetto ad assi che non sono solo centrali, ma anche principali. Per determinare quali assi passanti per il baricentro sono i principali, è necessario essere in grado di determinare i momenti di inerzia attorno agli assi ruotati l'uno rispetto all'altro di un certo angolo.
Le dipendenze tra i momenti di inerzia durante la rotazione degli assi coordinati (Fig. 35) hanno la forma seguente:

dove ma- angolo di rotazione degli assi e e v sugli assi henné rispettivamente. Viene considerato l'angolo a positivo se la rotazione degli assi e e tu vai Antiorario.

Riso. 35.
La somma dei momenti di inerzia assiali rispetto a qualsiasi asse reciprocamente perpendicolare non cambia quando vengono ruotati:
Quando gli assi ruotano attorno all'origine, il momento d'inerzia centrifugo cambia continuamente, quindi, ad una certa posizione degli assi, diventa uguale a zero.
Si chiamano due assi tra loro perpendicolari rispetto ai quali il momento d'inerzia centrifugo della sezione è uguale a zero principali assi di inerzia.
La direzione degli assi di inerzia principali può essere determinata come segue:

Due valori dell'angolo ottenuti dalla formula (43) ma differiscono tra loro di 90° e danno la posizione degli assi principali. Come puoi vedere, il più piccolo di questi angoli non supera in valore assoluto l /4. In futuro utilizzeremo solo un angolo più piccolo. Eseguito con questa angolazione asse principale sarà indicato dalla lettera E. Sulla fig. 36 mostra alcuni esempi di designazione degli assi principali secondo questa regola. Gli assi iniziali sono indicati da lettere eh w.

Riso. 36.
Nei problemi di flessione è importante conoscere i momenti d'inerzia assiali delle sezioni rispetto agli assi principali che passano per il baricentro della sezione.
Si chiamano gli assi principali passanti per il baricentro della sezione assi centrali principali. In quanto segue, di regola, per brevità chiameremo semplicemente questi assi assi principali, omettendo la parola "centrale".
L'asse di simmetria di una sezione piana è l'asse di inerzia centrale principale di questa sezione, il secondo asse è perpendicolare ad esso. In altre parole, l'asse di simmetria e qualsiasi perpendicolare ad esso formano un sistema di assi principali.
Se una sezione piana ha almeno due assi di simmetria che non sono perpendicolari tra loro, tutti gli assi che passano per il baricentro di tale sezione sono i suoi principali assi centrali di inerzia. Quindi, in fig. 37 mostra alcuni tipi di sezioni (cerchio, anello, quadrato, esagono regolare, ecc.), che hanno la seguente proprietà: qualsiasi asse passante per il loro baricentro è quello principale.

Riso. 37.
Va notato che gli assi principali non centrali non ci interessano.
Nella teoria della flessione valore più alto hanno momenti di inerzia rispetto agli assi centrali principali.
Principale punti centrali inerzia o principali momenti di inerzia sono i momenti di inerzia rispetto agli assi centrali principali. Inoltre, rispetto a uno degli assi principali, il momento d'inerzia massimo, rispetto all'altro - minimo:

Momenti d'inerzia assiali delle sezioni mostrate in fig. 37, calcolati rispetto agli assi centrali principali, sono tra loro uguali: J y , poi: giu = J x cos 2 a + J y sin a = Jx.
I momenti di inerzia di una sezione complessa sono uguali alla somma dei momenti di inerzia delle sue parti. Pertanto, per determinare i momenti di inerzia di una sezione complessa, possiamo scrivere:
dove eJ xi , J y „ J xiyi - momenti di inerzia delle singole parti della sezione.
NB: se la sezione presenta un foro, allora è conveniente considerarla come una sezione con area negativa.
Per eseguire calcoli di resistenza in futuro, introduciamo una nuova caratteristica geometrica della resistenza di una barra che lavora in curva rettilinea. Questa geometria è chiamata momento assiale modulo di resistenza o flessione.
Si chiama il rapporto tra il momento d'inerzia di una sezione attorno ad un asse e la distanza da questo asse al punto più distante della sezione momento di resistenza assiale:
Il momento di resistenza ha la dimensione di mm 3, cm 3.
Momenti di inerzia e momenti di resistenza dei più comuni sezioni semplici sono determinati dalle formule riportate in tabella. 3.
Per le travi in acciaio laminato (travi a I, travi a canale, travi angolari, ecc.), i momenti di inerzia e i momenti di resistenza sono riportati nelle tabelle dell'assortimento di acciai laminati, dove, oltre alle dimensioni, la sezione vengono fornite le aree, le posizioni dei baricentro e altre caratteristiche.
In conclusione, introduciamo il concetto raggio di rotazione sezioni relative agli assi delle coordinate X e a - io x e io y rispettivamente, che sono determinati dalle seguenti formule.