Sarcina are nevoie găsiți linia de intersecție a două plane și determinați dimensiunea reală a unuia dintre ele metoda mișcării plan-paralel.
Pentru a rezolva o astfel de problemă clasică în geometria descriptivă, trebuie să cunoașteți următorul material teoretic:
- trasarea proiecțiilor punctelor în spațiu pe un desen complex după coordonatele date;
- metode de precizare a unui plan pe un desen complex, a unui plan de poziţie generală şi particulară;
- liniile principale ale avionului;
- determinarea punctului de intersecție a unei drepte cu un plan (aflare „puncte de întâlnire”);
- metoda miscarii plan-paralel pentru determinarea marimii naturale a unei figuri plate;
— definirea vizibilității pe trasarea liniilor drepte și a planurilor cu ajutorul punctelor concurente.
Procedura de rezolvare a problemei
1. Conform opțiunii Atribuire prin coordonate punct, punem două plane pe desenul complex, specificate sub formă de triunghiuri ABC(A’, B’, C’; A, B, C) și DKE(D', K', E'; D, K, E) ( fig.1.1).
Fig.1.1
2 . Pentru a găsi linia de intersecție, folosim metoda planului de proiectie. Esența sa este că o latură (linia) a primului plan (triunghi) este luată și se află în planul proiectant. Se determină punctul de intersecție al acestei drepte cu planul celui de-al doilea triunghi. Repetând această sarcină din nou, dar pentru linia celui de-al doilea triunghi și planul primului triunghi, determinăm al doilea punct de intersecție. Deoarece punctele obținute aparțin simultan ambelor plane, ele trebuie să fie pe linia de intersecție a acestor planuri. Conectând aceste puncte cu o dreaptă, vom avea linia de intersecție dorită a planurilor.
3. Problema se rezolva astfel:
dar)înglobând într-un plan de proiecţie F(F') latură AB(A’ B’) a primului triunghi din planul de proiecție frontală V. Marcam punctele de intersecție ale planului proeminent cu laturile DKȘi DE al doilea triunghi, obținând puncte 1(1') și 2(2'). Le transferăm de-a lungul liniilor de comunicare în planul orizontal al proiecțiilor H pe laturile corespunzătoare ale triunghiului, punct 1 (1) pe partea de DEși punct 2(2) pe partea de DK.
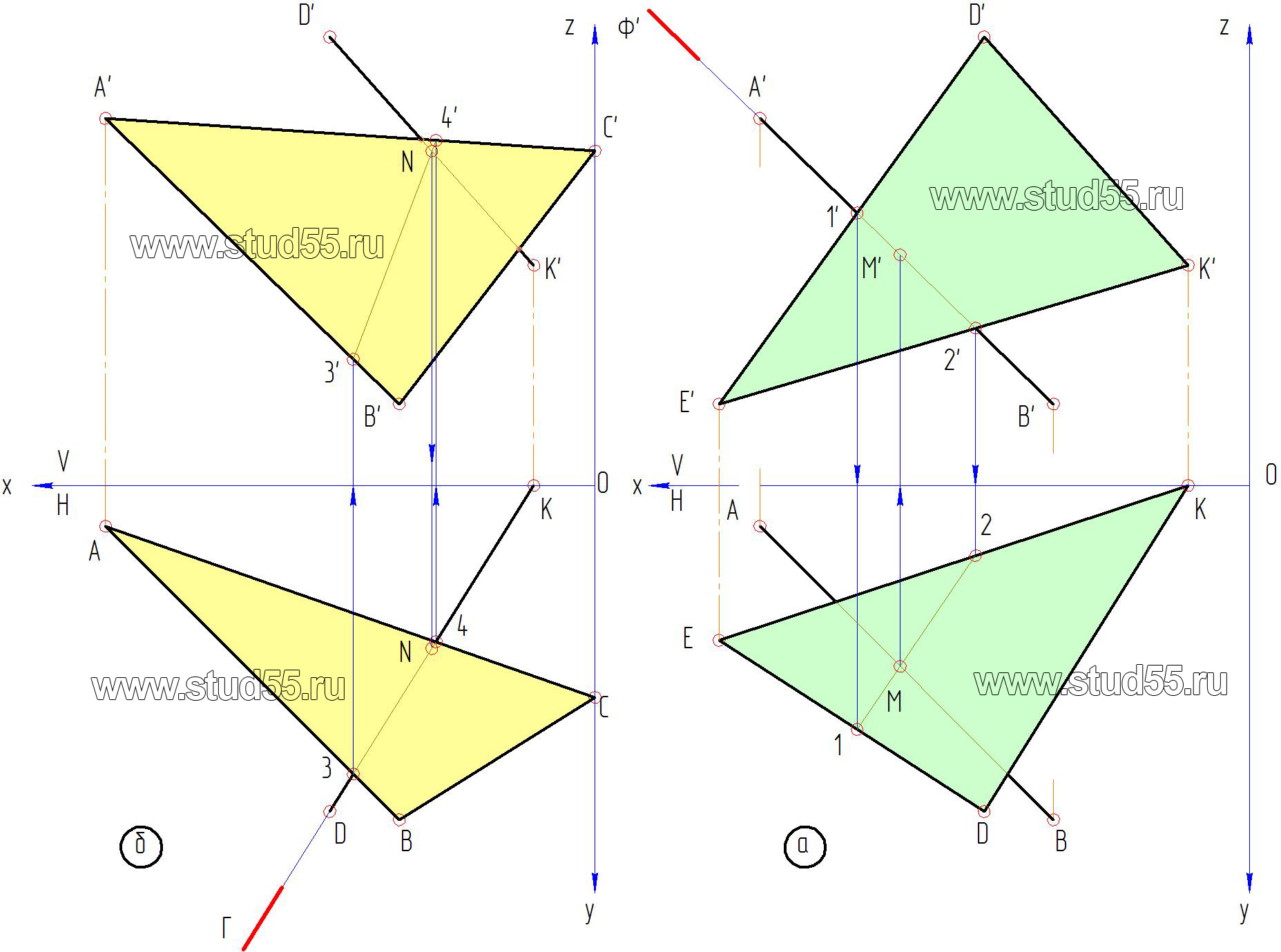
Fig.1.2
b) prin conectarea proiecţiilor punctelor 1 și 2, vom avea proiectia planului proiectant F. Apoi punctul de intersecție al dreptei AB cu planul triunghiului DKE se determină (după regulă) împreună cu intersecția proiecției planului proeminent 1-2 și proiecția cu același nume AB. Astfel, am obținut o proiecție orizontală a primului punct de intersecție al planurilor - M, de-a lungul căruia determinăm (proiectăm de-a lungul liniilor de comunicare) proiecția sa frontală - M’ pe o linie dreaptă A’ B’ (fig.1.2.a);
în) găsim al doilea punct în același mod. Încheiem în planul de proiectare G(G) latura celui de-al doilea triunghi DK(DK) . Marcam punctele de intersecție ale planului proeminent cu laturile primului triunghi ACȘiî.Hrîntr-o proiecție orizontală, obținând proiecții de puncte 3 și 4. Le proiectăm pe laturile corespunzătoare în plan frontal, obținem 3’ si 4'. Conectându-le cu o linie dreaptă, avem proiecția planului proiectant. Apoi, al doilea punct de intersecție al planurilor va fi la intersecția dreptei 3’-4’ cu latura unui triunghi D’ K’ , care a fost închis într-un plan proeminent. Astfel, am obținut proiecția frontală a celui de-al doilea punct de intersecție - N’ , de-a lungul liniei de comunicare găsim proiecția orizontală - N (fig.1.2.b).
G) prin conectarea punctelor MN(MN) Și (M’ N’) pe planul orizontal și frontal avem linia de intersecție dorită avioane date.
4. Cu ajutorul punctelor concurente, determinăm vizibilitatea avioanelor. Luați o pereche de puncte concurente, de exemplu, 1’=5’ în proiecție frontală. Le proiectăm pe laturile corespunzătoare în plan orizontal, obținem 1 și 5. Vedem că ideea 1 culcat pe o parte DE are o coordonată mare față de axă X decât punct 5 culcat pe o parte AÎN. Prin urmare, conform regulii coordonatei mai mari, punctul 1 iar latura triunghiului D'E’ în plan frontal va fi vizibil. Astfel, se determină vizibilitatea fiecărei laturi a triunghiului în planul orizontal și frontal. Liniile vizibile din desene sunt desenate cu o linie de contur solidă, iar liniile nevizibile sunt desenate cu o linie întreruptă. Amintiți-vă că în punctele de intersecție ale planelor ( M— N ȘiM’- N’ ) va schimba vizibilitatea.
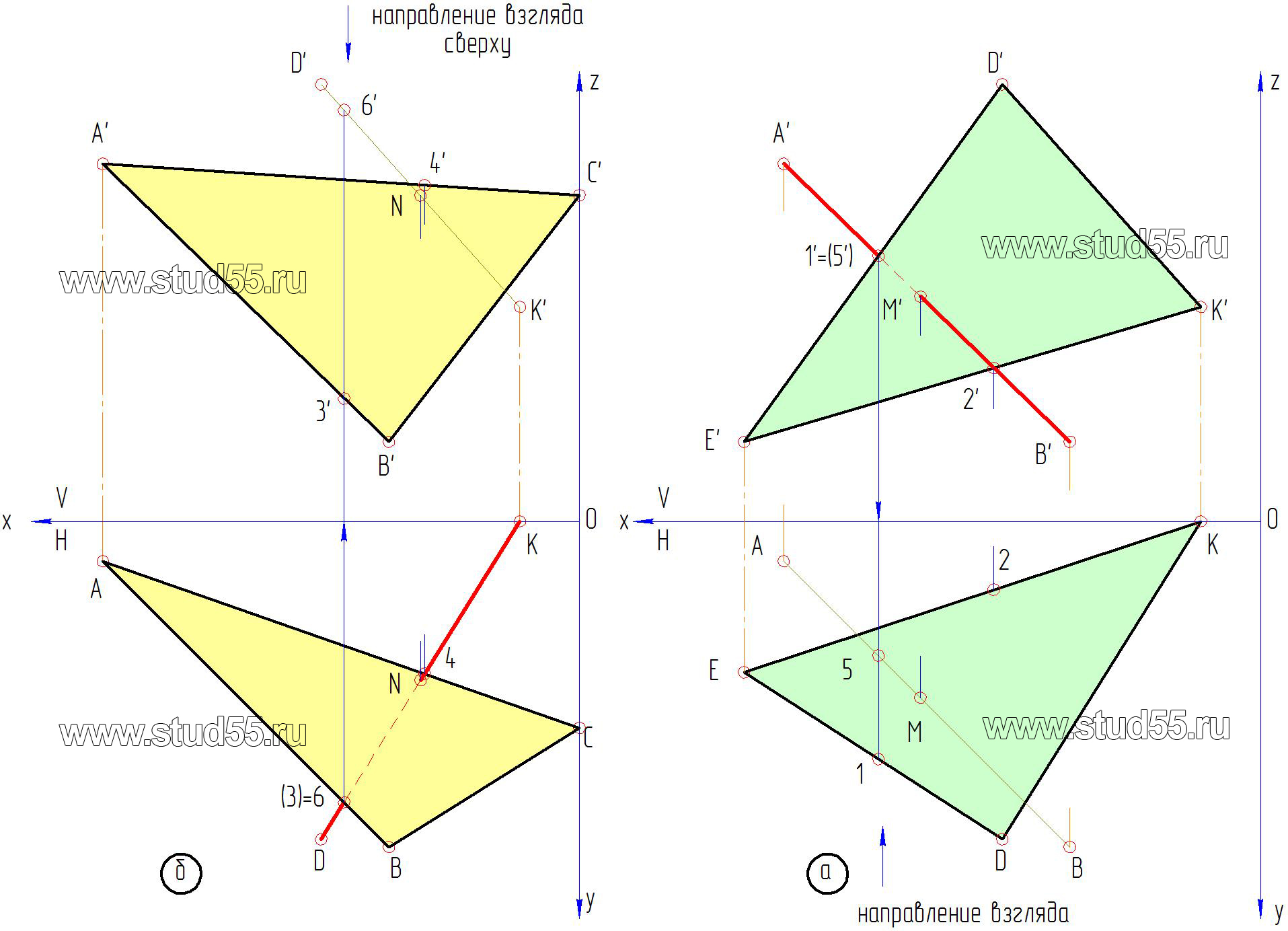
Fig.1.3

RFig.1.4 .
Graficul arată în plus definiția vizibilității în plan orizontal folosind puncte concurente 3 Și 6 pe linii drepte DKȘi AB.
5. Folosind metoda deplasării plan-paralel, determinăm dimensiunea reală a planului triunghiului ABC, Pentru ce:
dar)în planul specificat printr-un punct C(C) conduce un frontal C— F(DIN-FȘiC’- F’) ;
b) pe câmpul liber al desenului într-o proiecție orizontală, luăm (marcăm) un punct arbitrar De la 1, presupunând că acesta este unul dintre vârfurile triunghiului (în special, vârful C). Din aceasta restabilim perpendiculara pe planul frontal (prin axa x);

Fig.1.5
în) prin mișcare plan-paralelă traducem proiecția orizontală a triunghiului ABC, într-o nouă poziție A 1 B 1 C 1 în aşa fel încât în proiecţia frontală să ia o poziţie proeminentă (transformată în linie dreaptă). Pentru a face acest lucru: pe perpendiculara din punct De la 1, amânați proiecția frontală a orizontalei C 1 — F 1 (lungime lCF) obținem un punct F 1 . O soluție a unui compas dintr-un punct F1 mărimea FA facem un arc serif, și dintr-un punct C 1 - dimensiunea crestăturii CA, apoi la intersecția liniilor arcului obținem un punct A 1 (al doilea vârf al triunghiului);
- la fel obținem un punct B 1 (din punct C 1 faceți o crestătură cu dimensiunea C— B(57mm), iar din punct F 1 magnitudinea F— B(90mm).Rețineți că atunci când decizia corectă trei puncte A 1 F’ 1 Și B’ 1 trebuie să se afle pe o singură linie dreaptă (latura triunghiului A 1 — B 1 ) celelalte două laturi DIN 1 — A 1 Și C 1 — B 1 sunt obținute prin conectarea vârfurilor lor;
G) Din metoda de rotație rezultă că atunci când se deplasează sau se rotește un punct într-un plan de proiecție - pe planul conjugat, proiecția acestui punct ar trebui să se deplaseze în linie dreaptă, în cazul nostru particular, de-a lungul unei axe paralele drepte X. Apoi tragem din puncte A’ B’ C’ Din proiecția frontală, acestea sunt linii drepte (se numesc planuri de rotație ale punctelor), iar din proiecțiile frontale ale punctelor deplasate A 1 ÎN 1C 1 restabiliți perpendiculare (linii de legătură) ( fig.1.6).

Fig.1.6
Intersecția acestor drepte cu perpendicularele corespunzătoare oferă noi poziții ale proiecției frontale a triunghiului ABC, specific A’ 1 ÎN 1C’ 1 care ar trebui să devină o proeminentă (linie dreaptă) de la orizontală h 1 am desenat perpendicular pe planul de proiecție frontală ( fig.1.6);
5) apoi, pentru a obține dimensiunea naturală a triunghiului, este suficient să extindeți proiecția frontală a acestuia până la paralelism cu planul orizontal. Inversarea se efectuează folosind o busolă printr-un punct A' 1, considerându-l ca centru de rotație, punem un triunghi A’ 1 ÎN 1C’ 1 paralel cu axa X, primim A’ 2 ÎN 2C’ 2 . După cum am menționat mai sus, atunci când punctul se rotește, pe proiecția conjugată (acum pe orizontală), se mișcă în linii drepte. axă paralelă X. Omiterea perpendicularelor (linii de legătură) din proiecțiile frontale ale punctelor A’ 2 ÎN 2C’ 2 încrucișându-le cu liniile corespunzătoare găsim proiecția orizontală a triunghiului ABC (A 2 ÎN 2C 2 ) marime adevarata ( fig.1.7).
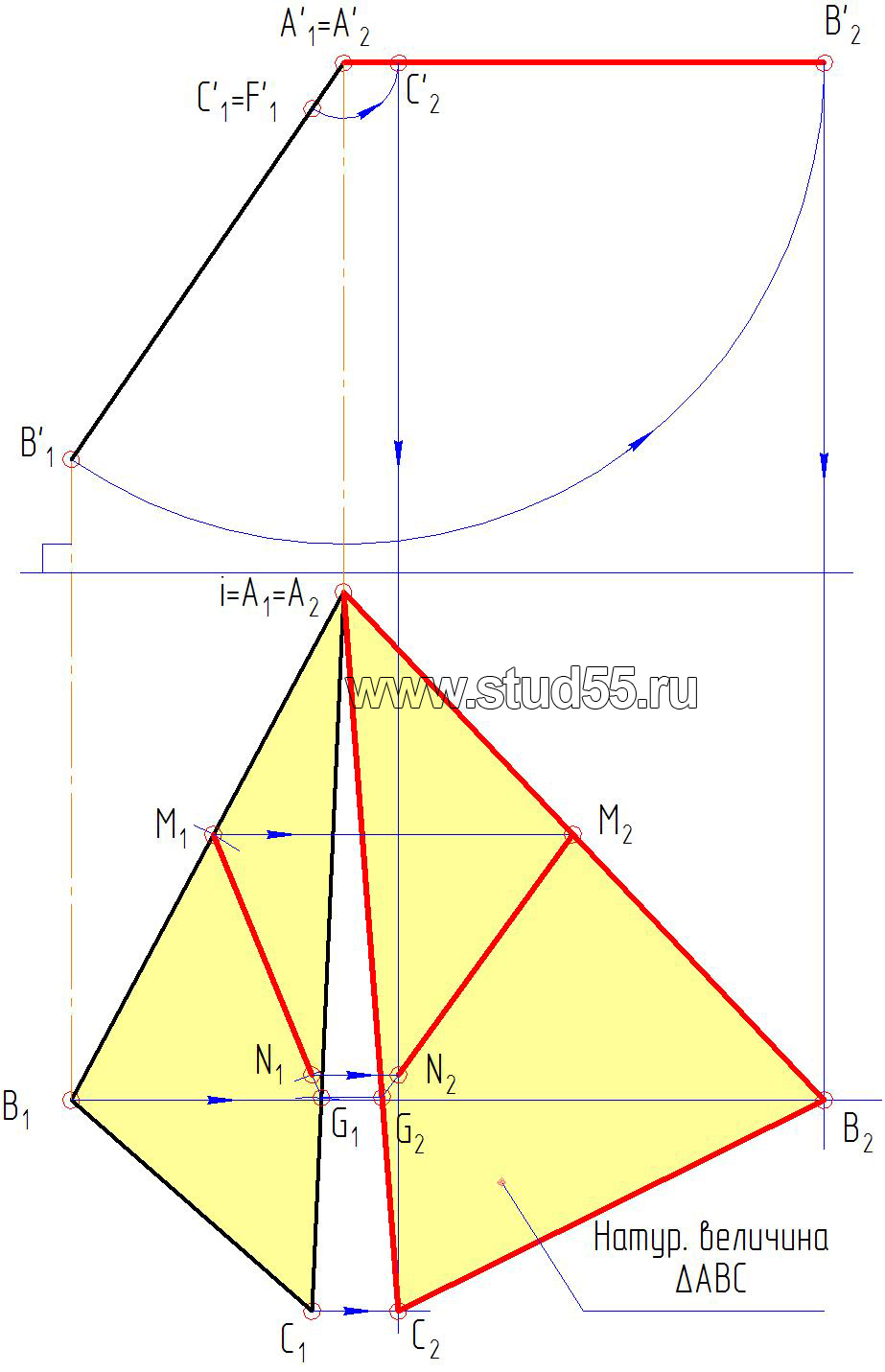
Orez. 1.7
Am toate soluțiile gata făcute la probleme cu astfel de coordonate, puteți cumpăra

Preț 55 de ruble, desene pe geometrie descriptiva din cartea lui Frolov, le puteti descarca usor imediat dupa plata sau iti trimit un email. Sunt într-o arhivă ZIP în diferite formate:
*.jpg – desenul color obișnuit al desenului pe o scară de la 1 la 1 la o rezoluție bună de 300 dpi;
*.cdw – formatul programului Compass 12 și o versiune ulterioară sau versiunea LT;
*.dwg și .dxf — AUTOCAD, format de program nanoCAD;
ÎN aceasta sectiune Să continuăm studiul temei ecuației unei drepte în spațiu din punctul de vedere al stereometriei. Aceasta înseamnă că vom considera o dreaptă în spațiul tridimensional ca o linie de intersecție a două plane.
Conform axiomelor stereometriei, dacă două plane nu coincid și au un punct comun, atunci au și o singură dreaptă comună, pe care se află toate punctele care sunt comune celor două planuri. Folosind ecuațiile a două plane care se intersectează, putem defini o linie dreaptă într-un sistem de coordonate dreptunghiular.
În cursul analizării temei, vom oferi numeroase exemple, o serie de ilustrații grafice și soluții detaliate necesare pentru o mai bună asimilare a materialului.
Să fie date două plane care nu coincid între ele și se intersectează. Să le notăm planul α și planul β. Să le plasăm într-un sistem de coordonate dreptunghiular O x y z spatiu tridimensional.
După cum ne amintim, orice plan dintr-un sistem de coordonate dreptunghiular este definit de ecuație generală plane de forma A x + B y + C z + D = 0 . Presupunem că planul α corespunde ecuației A 1 x + B 1 y + C 1 z + D 1 = 0 , iar planul β corespunde ecuației A 2 x + B 2 y + C 2 z + D 2 = 0 . În acest caz, vectorii normali ai planurilor α și β n 1 → \u003d (A 1, B 1, C 1) și n 2 → \u003d (A 2, B 2, C 2) nu sunt coliniari, deoarece planurile nu coincid între ele și e așezate paralel unul cu celălalt. Scriem această condiție după cum urmează:
n 1 → ≠ λ n 2 → ⇔ A 1 , B 1 , C 1 ≠ λ A 2 , λ B 2 , λ C 2 , λ ∈ R
Pentru a reîmprospăta materialul pe tema „Paralelismul avioanelor”, consultați secțiunea corespunzătoare a site-ului nostru.
Linia de intersecție a planurilor va fi notată cu literă A . Acestea. a = α ∩ β . Această dreaptă este un set de puncte care sunt comune ambelor planuri α și β. Aceasta înseamnă că toate punctele dreptei a satisfac ambele ecuații ale planului A 1 x + B 1 y + C 1 z + D 1 = 0 și A 2 x + B 2 y + C 2 z + D 2 = 0 . De fapt, ele sunt o soluție particulară a sistemului de ecuații A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 .
Soluție generală de sistem ecuatii lineare A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 definește coordonatele tuturor punctelor dreptei de-a lungul căreia se intersectează cele două plane α și β . Aceasta înseamnă că cu ajutorul lui putem determina poziția unei drepte într-un sistem de coordonate dreptunghiular O x y z .
Să luăm în considerare din nou teoria descrisă, acum cu un exemplu specific.
Exemplul 1
Linia O x este linia de-a lungul căreia se intersectează planuri de coordonate O x y și O x z . Definim planul O x y cu ecuația z = 0 , iar planul O x z cu ecuația y = 0 . Am discutat această abordare în detaliu în secțiunea „Ecuația generală incompletă a unui plan”, astfel încât, în caz de dificultăți, ne putem referi la acest material din nou. În acest caz, linia de coordonate O x este determinată într-un sistem de coordonate tridimensional printr-un sistem de două ecuații de forma y = 0 z = 0 .
Aflarea coordonatelor unui punct situat pe o dreaptă de-a lungul căreia se intersectează planele
Să luăm în considerare sarcina. Fie dat un sistem de coordonate dreptunghiular O x y z în spațiu tridimensional. Linia de-a lungul căreia două plane se intersectează cu a este dată de sistemul de ecuații A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 . Dat un punct din spațiul tridimensional M 0 x 0 , y 0 , z 0 .
Să determinăm dacă punctul M 0 x 0 , y 0 , z 0 aparține unei drepte date A .
Pentru a obține un răspuns la întrebarea problemei, înlocuim coordonatele punctului M 0 în fiecare dintre cele două ecuații ale planului. Dacă, ca rezultat al substituirii, ambele ecuații se transformă în egalități adevărate A 1 x 0 + B 1 y 0 + C 1 z 0 + D 1 = 0 și A 2 x 0 + B 2 y 0 + C 2 z 0 + D 2 = 0, atunci punctul M 0 aparține fiecărui plan și aparține dreptei date. Dacă cel puțin una dintre egalitățile A 1 x 0 + B 1 y 0 + C 1 z 0 + D 1 = 0 și A 2 x 0 + B 2 y 0 + C 2 z 0 + D 2 = 0 este falsă, atunci punctul M 0 nu aparține unei drepte.
Luați în considerare un exemplu de soluție
Exemplul 2
O dreaptă este dată în spațiu prin ecuații a două plane care se intersectează de forma 2 x + 3 y + 1 = 0 x - 2 y + z - 3 = 0 . Să se determine dacă punctele M 0 (1, - 1, 0) și N 0 (0, - 1 3 , 1) aparțin unei drepte de intersecție a planelor.
Soluţie
Să începem de la punctul M 0 . Substituiți coordonatele sale în ambele ecuații ale sistemului 2 1 + 3 (- 1) + 1 = 0 1 - 2 (- 1) + 0 - 3 = 0 ⇔ 0 = 0 0 = 0 .
În urma înlocuirii, am obținut egalitățile corecte. Aceasta înseamnă că punctul M 0 aparține ambelor plane și este situat pe linia de intersecție a acestora.
Să substituim coordonatele punctului N 0 (0, - 1 3, 1) în ambele ecuații ale planului. Se obține 2 0 + 3 - 1 3 + 1 = 0 0 - 2 - 1 3 + 1 - 3 = 0 ⇔ 0 = 0 - 1 1 3 = 0 .
După cum puteți vedea, a doua ecuație a sistemului s-a transformat într-o egalitate incorectă. Aceasta înseamnă că punctul N 0 nu aparține dreptei date.
Răspuns: punctul M 0 aparține unei linii drepte, iar punctul N 0 nu.
Acum vă oferim un algoritm de găsire a coordonatelor unui anumit punct aparținând unei drepte, dacă dreapta în spațiu într-un sistem de coordonate dreptunghiular O xyz este determinată de ecuațiile planurilor care se intersectează A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 .
Numărul de soluții ale unui sistem de două ecuații liniare cu necunoscute A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 este infinit. Oricare dintre aceste soluții poate fi o soluție la problemă.
Să luăm un exemplu.
Exemplul 3
Fie dată o dreaptă în spațiul tridimensional de ecuațiile a două plane care se intersectează de forma x + 3 z + 7 = 0 2 x + 3 y + 3 z + 2 = 0 . Găsiți coordonatele oricăruia dintre punctele de pe această dreaptă.
Soluţie
Să rescriem sistemul de ecuații x + 3 z + 7 = 0 2 x + 3 y + 3 z + 2 = 0 ⇔ x + 0 y + 3 z = - 7 2 x + 3 y + 3 z = - 2 .
Să luăm un minor de ordinul doi, altul decât zero, ca bază minoră a matricei principale a sistemului 1 0 2 3 = 3 ≠ 0 . Înseamnă că z este o variabilă necunoscută gratuită.
Transferăm termenii care conțin variabila necunoscută liberă z în partea dreaptă a ecuațiilor:
x + 0 y + 3 z = - 7 2 x + 3 y + 3 z = - 2 ⇔ x + 0 y = - 7 - 3 z 2 x + 3 y = - 2 - 3 z
Introducem un arbitrar numar realλ și să presupunem că z = λ .
Atunci x + 0 y = - 7 - 3 z 2 x + 3 y = - 2 - 3 z ⇔ x + 0 y = - 7 - 3 λ 2 x + 3 y = - 2 - 3 λ .
Pentru a rezolva sistemul de ecuații rezultat, aplicăm metoda Cramer:
∆ = 1 0 2 3 = 1 3 - 0 1 = 2 ∆ x = - 7 - 3 λ 0 - - 3 λ 3 = - 7 - 3 λ 3 - 0 (- 2 - 3 λ) = 21 - 9 λ ⇒ x = ∆ x ∆ = - 7 - 3 λ ∆ y = 1 - 7 - 3 λ 2 - 2 - 3 λ = 1 - 2 - 3 λ - - 7 - 3 λ = 12 + 3 λ ⇒ y = ∆ y ∆ = 4 + λ
Rezolvarea generală a sistemului de ecuații x + 3 z + 7 = 0 2 x + 3 y + 3 z + 2 = 0 va fi x = - 7 - 3 λ y = 4 + λ z = λ , unde λ ∈ R .
Pentru a obține o anumită soluție a sistemului de ecuații, care ne va oferi coordonatele dorite ale unui punct aparținând unei linii date, trebuie să luăm o anumită valoare a parametrului λ. Dacă λ = 0 , atunci x = - 7 - 3 0 y = 4 + 0 z = 0 ⇔ x = - 7 y = 4 z = 0 .
Acest lucru ne permite să obținem coordonatele punctului dorit - 7 , 4 , 0 .
Să verificăm corectitudinea coordonatelor găsite ale punctului prin substituirea lor în ecuațiile inițiale a două plane care se intersectează - 7 + 3 0 + 7 = 0 2 (- 7) + 3 4 + 3 0 + 2 = 0 ⇔ 0 = 0 0 = 0.
Răspuns: - 7 , 4 , 0
Vector direcție al unei drepte de-a lungul căreia două plane se intersectează
Să ne uităm la cum să determinăm coordonatele vectorului de direcție al unei linii drepte, care este dată de ecuațiile a două plane care se intersectează A 1 x + B 1 y + C 1 z + D 1 = 0 și A 2 x + B 2 y + C 2 z + D 2 = 0 . Într-un sistem de coordonate dreptunghiular 0xz, vectorul de direcție al unei linii drepte este inseparabil de o linie dreaptă.
După cum știm, o dreaptă este perpendiculară pe un plan dacă este perpendiculară pe orice dreaptă situată în planul dat. Pe baza celor de mai sus, vectorul normal al planului este perpendicular pe orice vector diferit de zero situat în planul dat. Aceste două fapte ne vor ajuta să găsim vectorul de direcție al dreptei.
Planurile α și β se intersectează de-a lungul dreptei A . Vector de direcție a → linie dreaptă A este perpendiculară pe vectorul normal n 1 → = (A 1 , B 1 , C 1) al planului A 1 x + B 1 y + C 1 z + D 1 = 0 și pe vectorul normal n 2 → = (A 2 , B 2 , C 2) plane A 2 x + B 2 y + C 2 z + D 2 = 0 .
Vector de direcție drept A reprezintă produs vectorial vectori n → 1 = (A 1 , B 1 , C 1 ) și n 2 → = A 2 , B 2 , C 2 .
a → = n → 1 × n 2 → = i → j → k → A 1 B 1 C 1 A 2 B 2 C 2
Definim mulțimea tuturor vectorilor de direcție ai dreptei ca λ · a → = λ · n 1 → × n 2 → , unde λ este un parametru care poate lua orice valoare reală, alta decât zero.
Exemplul 4
Fie ca o dreaptă în spațiu într-un sistem de coordonate dreptunghiular O x y z să fie dată de ecuațiile a două plane care se intersectează x + 2 y - 3 z - 2 = 0 x - z + 4 = 0 . Găsiți coordonatele oricărui vector de direcție al acestei linii.
Soluţie
Planele x + 2 y - 3 z - 2 = 0 și x - z + 4 = 0 au vectori normali n 1 → = 1 , 2 , - 3 și n 2 → = 1 , 0 , - 1 . Să luăm ca vector de direcție al unei linii drepte, care este intersecția a două plane date, produsul vectorial al vectorilor normali:
a → = n → 1 × n 2 → = i → j → k → 1 2 - 3 1 0 - 1 = i → 2 (- 1) + j → (- 3) 1 + k → 1 0 - - k → 2 1 - j → 1 (- 1) - i → (- 3) 0 = - 2 i → - 2 j → - 2 k →
Să scriem răspunsul în forma de coordonate a → = - 2 , - 2 , - 2 . Pentru cei care nu-și amintesc cum se face acest lucru, vă recomandăm să vă referiți la subiectul „Coordonatele vectoriale într-un sistem de coordonate dreptunghiular”.
Răspuns: a → = - 2 , - 2 , - 2
Trecerea la ecuațiile parametrice și canonice ale unei linii drepte în spațiu
Pentru a rezolva unele probleme, este mai ușor de utilizat ecuații parametrice linie în spațiu de forma x = x 1 + a x λ y = y 1 + a y λ z = z 1 + a z λ sau ecuații canonice linie în spațiu de forma x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ . În aceste ecuații, ax , ay , az sunt coordonatele vectorului de direcție al dreptei, x 1 , y 1 , z 1 sunt coordonatele unui punct de pe linia dreaptă, iar λ este un parametru care ia valori reale arbitrare .
Dintr-o ecuație în linie dreaptă de forma A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0, puteți merge la ecuațiile canonice și parametrice a unei linii drepte în spațiu. Pentru a scrie ecuațiile canonice și parametrice ale unei drepte, avem nevoie de abilitățile de a găsi coordonatele unui anumit punct de pe linia dreaptă, precum și coordonatele unui vector de direcție al dreptei, date de ecuațiile a două care se intersectează. avioane.
Să ne uităm la exemplul de mai sus.
Exemplul 5
Să stabilim o dreaptă într-un sistem de coordonate tridimensional prin ecuațiile a două plane care se intersectează 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 . Să scriem ecuațiile canonice și parametrice ale acestei linii.
Soluţie
Aflați coordonatele vectorului de direcție al dreptei, care este produsul vectorial al vectorilor normali n 1 → = 2 , 1 , - 1 ai planului 2 x + y - z - 1 = 0 și n 2 → = (1 , 3 , - 2) al planului x + 3 y-2z=0:
a → = n 1 → × n 2 → = i → j → k → 2 1 - 1 1 3 - 2 = i → 1 (- 2) + j → (- 1) 1 + k → 2 3 - - k → 1 1 - j → 2 (- 2) - i → (- 1) 3 = i → + 3 j → + 5 k →
Coordonatele vectorului de direcție ale dreptei a → = (1 , 2 , 5) .
Următorul pas este de a determina coordonatele unui punct al dreptei date, care este una dintre soluțiile sistemului de ecuații: 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 ⇔ 2 x + y - z = 1 x + 3 y - 2z = 0 .
Să luăm determinantul 2 1 1 3 = 2 · 3 - 1 · 1 = 5 ca o matrice minoră a sistemului, care este diferită de zero. În acest caz, variabila z este gratuit. Transferăm termenii cu ea în partea dreaptă a fiecărei ecuații și dăm variabilei o valoare arbitrară λ:
2 x + y - z = 1 x + 3 y - 2 z = 0 ⇔ 2 x + y = 1 + zx + 3 y = 2 z ⇔ 2 x + y = 1 + λ x + 3 y = 2 λ , λ ∈ R
Aplicam metoda Cramer pentru a rezolva sistemul de ecuatii rezultat:
∆ = 2 1 1 3 = 2 3 - 1 1 = 5 ∆ x = 1 + λ 1 2 λ 3 = (1 + λ) 3 - 1 2 λ = 3 + λ ⇒ x = ∆ x ∆ = 3 + λ 5 = 3 5 + 1 5 λ ∆ y = 2 1 + λ 1 2 λ = 2 2 λ - (1 + λ) 1 = - 1 + 3 λ ⇒ y = ∆ y ∆ = - 1 + 3 λ 5 = - 1 5 + 3 5 λ
Se obține: 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 ⇔ x = 3 5 + 1 5 y = - 1 5 + 3 5 z = λ
Să luăm λ = 2 pentru a obține coordonatele unui punct pe o dreaptă: x 1 = 3 5 + 1 5 2 y 1 = - 1 5 + 3 5 2 z 1 = 2 ⇔ x 1 = 1 y 1 = 1 z 1 = 2 . Acum avem suficiente date pentru a scrie ecuațiile canonice și parametrice ale acestei drepte în spațiu: x - x 1 ax = y - y 1 ay = z - z 1 az ⇔ x - 1 1 = y - 1 3 = z - 2 5 x = x 1 + ax λ y = y 1 + ay λ z = z 1 + az λ ⇔ x = 1 + 1 λ y = 1 + 3 λ z = 2 + 5 λ ⇔ x = 1 + λ y = 1 + 3 λ z = 2 + 5 λ
Răspuns: x - 1 1 = y - 1 3 = z - 2 5 și x = 1 + λ y = 1 + 3 λ z = 2 + 5 λ
Această problemă are o altă modalitate de a o rezolva.
Aflarea coordonatelor unui anumit punct pe o dreaptă se realizează prin rezolvarea sistemului de ecuații A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0.
În cazul general, soluțiile sale pot fi scrise sub forma ecuațiilor parametrice dorite ale unei drepte în spațiul x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ .
Obținerea ecuațiilor canonice se realizează astfel: rezolvăm fiecare dintre ecuațiile obținute în raport cu parametrul λ, echivalăm părțile drepte ale egalității.
x = x 1 + ax λ y = y 1 + ay λ z = z 1 + az λ ⇔ λ = x - x 1 ax λ = y - y 1 ay λ = z - z 1 az ⇔ x - x 1 ax = y - y 1 ay = z - z 1 az
Aplicabil Pe aici la rezolvarea problemei.
Exemplul 6
Să stabilim poziția dreptei prin ecuațiile a două plane care se intersectează 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 . Să scriem ecuațiile parametrice și canonice pentru această dreaptă.
Soluţie
Rezolvarea unui sistem de două ecuații cu trei necunoscute se realizează în același mod ca în exemplul anterior. Se obține: 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 ⇔ x = 3 5 + 1 5 λ y = - 1 5 + 3 5 λ z = λ .
Acestea sunt ecuațiile parametrice ale unei linii drepte în spațiu.
Ecuațiile canonice se obțin astfel: x = 3 5 + 1 5 λ y = - 1 5 + 3 5 λ z = λ ⇔ λ = x - 3 5 1 5 λ = y + 1 5 3 5 λ = z 1 ⇔ x - 3 5 1 5 = y + 1 5 3 5 = z 1
Ecuațiile obținute în ambele exemple diferă extern, dar sunt echivalente, deoarece determină același set de puncte în spațiul tridimensional și, prin urmare, aceeași linie dreaptă.
Răspuns: x - 3 5 1 5 = y + 1 5 3 5 = z 1 și x = 3 5 + 1 5 λ y = - 1 5 + 3 5 λ z = λ
Dacă observați o greșeală în text, vă rugăm să o evidențiați și să apăsați Ctrl+Enter
Dacă două avioane intersectează, atunci sistemul de ecuații liniare definește ecuația unei drepte în spațiu.
Adică, linia dreaptă este dată de ecuațiile a două plane. O sarcină tipică și comună este de a rescrie ecuațiile unei linii drepte în forma canonică:
Exemplul 9
Soluţie: Pentru a scrie ecuațiile canonice ale unei drepte, trebuie să cunoașteți punctul și vectorul direcție. Și am dat ecuațiile a două plane ....
1) Mai întâi, găsiți un punct care aparține dreptei date. Cum să o facă? În sistemul de ecuații, trebuie să resetați anumite coordonate. Fie , atunci obținem un sistem de două ecuații liniare cu două necunoscute: . Adăugăm ecuațiile termen cu termen și găsim soluția sistemului:
Astfel, punctul aparține acestei linii. Acordați atenție următorului punct tehnic: este de dorit să găsiți un punct cu întreg coordonatele. Dacă am pune la zero „x” sau „z” în sistem, atunci nu este un fapt că am obține un punct „bun” fără coordonate fracționale. O astfel de analiză și selecție a unui punct ar trebui efectuate mental sau pe o schiță.
Să verificăm: să substituim coordonatele punctului în sistemul original de ecuații: . Se obțin egalitățile corecte, ceea ce înseamnă că .
2) Cum să găsiți vectorul de direcție al unei linii drepte? Locația sa este demonstrată clar de următorul desen schematic:
Vectorul direcție al dreptei noastre este ortogonal cu vectorii normali ai planelor. Și dacă , atunci găsim vectorul „pe” ca produs vectorial vectori normali: .
Din ecuațiile planelor, eliminăm vectorii lor normali:
Și găsim vectorul direcție al dreptei:
Cum se verifică rezultatul a fost discutat în articol Produsul încrucișat al vectorilor.
3) Să compunem ecuațiile canonice ale unei drepte după un punct și un vector de direcție:
Răspuns:
În practică, puteți utiliza o formulă gata făcută: dacă o dreaptă este dată de intersecția a două plane, atunci vectorul este vectorul de direcție al acestei drepte.
Exemplul 10
Scrieți ecuațiile canonice ale dreptei
Acesta este un exemplu de do-it-yourself. Răspunsul dvs. poate diferi de al meu (în funcție de punctul pe care îl alegeți). Dacă există o diferență, atunci pentru a verifica, luați un punct din ecuația dvs. și înlocuiți-l în ecuația mea (sau invers).
Soluție completăși răspunsul la sfârșitul lecției.
În a doua parte a lecției ne vom uita la aranjament reciproc linii în spațiu, precum și analiza problemelor care sunt asociate cu liniile și punctele spațiale. Sunt chinuit de așteptări vagi că materialul va fi decent, așa că este mai bine să faci o pagină web separată până la urmă.
Bine ati venit: Probleme cu o linie dreaptă în spațiu >>>
Solutii si raspunsuri:
Exemplul 4: Răspunsuri:
Exemplul 6: Soluţie: Găsiți vectorul direcție al dreptei:
Vom compune ecuațiile dreptei după punctul și vectorul direcție:
Răspuns
: ("y" - oricare) :
Răspuns
:
Să luăm în considerare un exemplu de soluție.
Exemplu.
Aflați coordonatele oricărui punct de pe o dreaptă dată în spațiu de ecuațiile a două plane care se intersectează  .
.
Soluţie.
Să rescriem sistemul de ecuații în forma următoare
Ca bază minoră a matricei principale a sistemului, luăm minorul non-zero de ordinul doi  , adică z este o variabilă necunoscută liberă. Să transferăm termenii care conțin z în părțile drepte ale ecuațiilor: .
, adică z este o variabilă necunoscută liberă. Să transferăm termenii care conțin z în părțile drepte ale ecuațiilor: .
Să acceptăm , unde este un număr real arbitrar, atunci .
Să rezolvăm sistemul de ecuații rezultat: 
Astfel, soluția generală a sistemului de ecuații are forma , unde .
Dacă luăm o anumită valoare a parametrului, atunci obținem o anumită soluție a sistemului de ecuații, care ne oferă coordonatele dorite ale unui punct situat pe o dreaptă dată. Să o luăm atunci  , prin urmare, este punctul dorit al dreptei.
, prin urmare, este punctul dorit al dreptei.
Puteți verifica coordonatele punctului găsit, înlocuindu-le în ecuațiile originale ale două plane care se intersectează: 
Răspuns:
Vectorul direcție al dreptei de-a lungul căreia se intersectează cele două plane.
Într-un sistem de coordonate dreptunghiulare, vectorul direcție al dreptei este inseparabil de o linie dreaptă. Când linia a într-un sistem de coordonate dreptunghiular în spațiu tridimensional este dată de ecuațiile a două plane care se intersectează și , atunci coordonatele vectorului de direcție al dreptei nu sunt vizibile. Acum vom arăta cum să le determinăm.
Știm că o dreaptă este perpendiculară pe un plan atunci când este perpendiculară pe orice dreaptă din acel plan. Atunci vectorul normal al planului este perpendicular pe orice vector diferit de zero situat în acest plan. Vom folosi aceste fapte atunci când găsim vectorul de direcție al dreptei.
Linia a se află atât în plan, cât și în plan. Prin urmare, vectorul de direcție al dreptei a este de asemenea perpendicular pe vectorul normal ![]() planul și vectorul normal
planul și vectorul normal ![]() avioane. Astfel, vectorul de direcție al dreptei a este
avioane. Astfel, vectorul de direcție al dreptei a este ![]() Și
Și ![]() :
:
Mulțimea tuturor vectorilor de direcție ai dreptei și putem seta ca  , unde este un parametru care ia orice valoare reală, alta decât zero.
, unde este un parametru care ia orice valoare reală, alta decât zero.
Exemplu.
Găsiți coordonatele oricărui vector de direcție al unei linii care este dată în sistemul de coordonate dreptunghiular Oxyz în spațiul 3D prin ecuațiile a două plane care se intersectează  .
.
Soluţie.
Vectorii normali ai planelor și sunt vectorii ![]() Și
Și ![]() respectiv. Vectorul de direcție al dreptei, care este intersecția a două plane date, vom lua produsul vectorial al vectorilor normali:
respectiv. Vectorul de direcție al dreptei, care este intersecția a două plane date, vom lua produsul vectorial al vectorilor normali: 
Răspuns:
![]()
Trecerea la ecuațiile parametrice și canonice ale unei linii drepte în spațiu.
Există cazuri în care utilizarea ecuațiilor a două plane care se intersectează pentru a descrie o dreaptă nu este foarte convenabilă. Unele probleme sunt mai ușor de rezolvat dacă ecuațiile canonice ale unei linii drepte în spațiul formei  sau ecuații parametrice ale unei linii drepte în spațiul formei
sau ecuații parametrice ale unei linii drepte în spațiul formei  , unde x 1 , y 1 , z 1 sunt coordonatele unui punct al dreptei, a x , a y , a z sunt coordonatele vectorului de direcție al dreptei și este un parametru care ia valori reale arbitrare. Să descriem procesul de tranziție de la ecuațiile directe ale formei
, unde x 1 , y 1 , z 1 sunt coordonatele unui punct al dreptei, a x , a y , a z sunt coordonatele vectorului de direcție al dreptei și este un parametru care ia valori reale arbitrare. Să descriem procesul de tranziție de la ecuațiile directe ale formei  la ecuațiile canonice și parametrice ale unei linii drepte în spațiu.
la ecuațiile canonice și parametrice ale unei linii drepte în spațiu.
În paragrafele anterioare, am învățat cum să găsim coordonatele unui anumit punct pe o dreaptă, precum și coordonatele unui vector de direcție al unei drepte, care este dat de ecuațiile a două plane care se intersectează. Aceste date sunt suficiente pentru a scrie atât ecuațiile canonice, cât și cele parametrice ale acestei linii într-un sistem de coordonate dreptunghiular în spațiu.
Luați în considerare soluția exemplului și după aceea vom arăta o altă modalitate de a găsi ecuațiile canonice și parametrice ale unei linii drepte în spațiu.
Exemplu.

Soluţie.
Să calculăm mai întâi coordonatele vectorului de direcție al dreptei. Pentru a face acest lucru, găsim produsul vectorial al vectorilor normali ![]() Și
Și ![]() avioane
avioane ![]() Și
Și ![]() :
:
adică .
Acum să determinăm coordonatele unui punct al dreptei date. Pentru a face acest lucru, găsim una dintre soluțiile sistemului de ecuații  .
.
Determinant  este diferit de zero, îl luăm ca bază minoră a matricei principale a sistemului. Atunci variabila z este liberă, transferăm termenii cu ea în partea dreaptă a ecuațiilor și dăm variabilei z o valoare arbitrară:
este diferit de zero, îl luăm ca bază minoră a matricei principale a sistemului. Atunci variabila z este liberă, transferăm termenii cu ea în partea dreaptă a ecuațiilor și dăm variabilei z o valoare arbitrară:
Rezolvăm sistemul de ecuații rezultat prin metoda Cramer: 
Prin urmare, 
Acceptăm , în timp ce obținem coordonatele punctului dreptei:  .
.
Acum putem scrie ecuațiile canonice și parametrice necesare ale liniei originale în spațiu: 
Răspuns:
![]() Și
Și 
Iată a doua modalitate de a rezolva această problemă.
Când găsim coordonatele unui anumit punct pe o dreaptă, rezolvăm sistemul de ecuații . În general, soluțiile sale pot fi scrise ca .
Și acestea sunt doar ecuațiile parametrice dorite ale unei linii drepte în spațiu. Dacă fiecare dintre ecuațiile obținute este rezolvată în raport cu parametrul și apoi părțile din dreapta egalităților sunt egalate, atunci obținem ecuațiile canonice ale dreptei în spațiu 
Să arătăm soluția problemei anterioare prin această metodă.
Exemplu.
O linie dreaptă în spațiul tridimensional este dată de ecuațiile a două plane care se intersectează . Scrieți ecuațiile canonice și parametrice ale acestei drepte.
Soluţie.
Noi decidem acest sistem din două ecuații cu trei necunoscute (soluția este dată în exemplul anterior, nu ne vom repeta). În același timp, primim . Acestea sunt ecuațiile parametrice dorite ale unei linii drepte în spațiu.
Rămâne să obținem ecuațiile canonice ale unei linii drepte în spațiu: 
Ecuațiile obținute ale dreptei diferă în exterior de ecuațiile obținute în exemplul anterior, dar sunt echivalente, deoarece definesc același set de puncte în spațiul tridimensional (și, prin urmare, aceeași linie dreaptă).
Răspuns:
 Și
Și 
Bibliografie.
- Bugrov Ya.S., Nikolsky S.M. matematica superioara. Volumul unu: Elemente de algebră liniară și geometrie analitică.
- Ilyin V.A., Poznyak E.G. Geometrie analitică.