mozgási feladatok
A (4) egyenletet használjuk, és ennek deriváltját vesszük az idő függvényében
A (8)-ban egységvektorokkal a sebességvektor vetületei vannak koordinátatengelyek
A koordinátatengelyekre vonatkozó sebességvetületek a megfelelő koordináták első deriváltjaiként vannak definiálva.
Az előrejelzések ismeretében meg lehet találni vektor modulusés az ő irányát
 ,
(10)
,
(10)
Sebesség meghatározása természetes úton
mozgási feladatok
Legyen adott egy anyagi pont pályája és a görbe koordináta változásának törvénye. Tegyük fel, hogy t 1 pont volt  és a koordináta s 1 , míg t 2 - koordináta s 2. Alatt
és a koordináta s 1 , míg t 2 - koordináta s 2. Alatt
 koordináta megnövekedett
koordináta megnövekedett  , azután átlagsebesség pontokat
, azután átlagsebesség pontokat
 .
.
Ahhoz, hogy megtaláljuk a sebességet egy adott pillanatban, átlépjük a határt
 ,
,
 .
(12)
.
(12)
Egy pont sebességvektorát a mozgás megadásának természetes módja szerint a görbe koordináta első deriváltjaként definiáljuk.
pont gyorsulás
Anyagi pont gyorsulása alatt olyan vektormennyiséget értsen, amely egy pont sebességvektorának nagyságrendi és irányú változásának sebességét jellemzi az időben.
Egy pont gyorsulása a mozgás megadásának vektoros módszerével
Tekintsünk egy pontot két időpontban t 1
( ) és t 2
(
) és t 2
( ), azután
), azután  - időnövekedés
- időnövekedés  - sebességnövekedés.
- sebességnövekedés.
Vektor  mindig a mozgás síkjában fekszik és a pálya konkávsága felé irányul.
mindig a mozgás síkjában fekszik és a pálya konkávsága felé irányul.
P 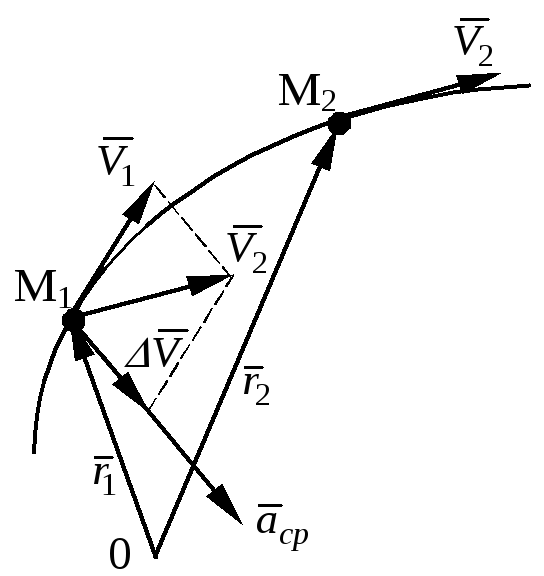 egy átlagos pontgyorsulás alatt
t
megérteni a nagyságát
egy átlagos pontgyorsulás alatt
t
megérteni a nagyságát
 .
(13)
.
(13)
Ahhoz, hogy megtaláljuk a gyorsulást egy adott időpillanatban, elérjük a határértéket
 ,
,
 .
(14)
.
(14)
Egy pont gyorsulását egy adott időpontban a pont sugárvektorának második időbeli deriváltjaként vagy a sebességvektor első időbeli deriváltjaként definiáljuk.
A gyorsulásvektor az összefüggő síkban helyezkedik el, és a pálya konkávsága felé irányul.
Egy pont gyorsulása a mozgásmeghatározás koordináta módszerével
Használjuk a vektor és a koordináta közötti kapcsolat egyenletét a mozgás megadására
És vegyük ki belőle a második származékot
 ,
,
 .
(15)
.
(15)
A (15) egyenletben egységvektorokkal a gyorsulásvektor vetületei vannak a koordináta tengelyekre
 .
(16)
.
(16)
A koordinátatengelyeken lévő gyorsulási vetületek a sebességvetületek első időbeli deriváltjaként vagy a megfelelő koordináták második időbeli deriváltjaiként vannak definiálva.
A gyorsulási vektor modulja és iránya a következő kifejezésekből található
 ,
(17)
,
(17)
 ,
,
 ,
, .
(18)
.
(18)
Egy pont gyorsulása a mozgás megadásának természetes módjával
P  Hagyja, hogy a pont görbe vonalú pályán mozogjon. Tekintsünk két helyzetét az idő pillanatában t
(s, M, v) és t 1
(s 1 , M 1 , v 1).
Hagyja, hogy a pont görbe vonalú pályán mozogjon. Tekintsünk két helyzetét az idő pillanatában t
(s, M, v) és t 1
(s 1 , M 1 , v 1).
Ebben az esetben a gyorsulást a természetes koordinátarendszer M ponttal együtt mozgó tengelyeire vonatkozó vetületei határozzák meg. A tengelyek a következőképpen vannak irányítva:
M - érintő, a pálya érintője mentén, a távolság pozitív referenciapontja felé irányítva,
M n- a főnormál, amely az összefüggő síkban fekvő normál mentén irányul, és a pálya homorúsága felé irányul,
M b a binormális, merőleges az M síkra nés az első tengellyel jobboldali hármast alkot.
Mivel a gyorsulásvektor egy összefüggő síkban fekszik, akkor a b = 0. Keressük a gyorsulás vetületeit más tengelyekre.
 .
(19)
.
(19)
Vetítsük a (19)-et a koordinátatengelyekre
 ,
(20)
,
(20)
 .
(21)
.
(21)
Rajzolja át az M 1 pont tengelyét párhuzamos a tengelyekkel az M pontban, és keresse meg a sebesség-vetületeket:
ahol - az úgynevezett szomszédsági szög.
(22) helyett (20)
 .
.
Nál nél t 0 0, kötözősaláta 1 akkor

 .
(23)
.
(23)
Egy pont tangenciális gyorsulását a sebesség első deriváltja vagy a görbe koordináta második idő deriváltja határozza meg.
A tangenciális gyorsulás a sebességvektor nagyságrendi változását jellemzi.
(22) helyett (21)
 .
.
Szorozzuk meg a számlálót és a nevezőt ezzel s hogy ismert határokat kapjunk
ahol  (első figyelemre méltó határ),
(első figyelemre méltó határ),
 ,
, ,
,
 , ahol
- a pálya görbületi sugara.
, ahol
- a pálya görbületi sugara.
A számított határértékeket (24) behelyettesítve kapjuk
 .
(25)
.
(25)
Egy pont normál gyorsulását a sebesség négyzetének és a pálya görbületi sugarának aránya határozza meg az adott pontban.
A normál gyorsulás a sebességvektor iránybeli változását jellemzi, és mindig a pálya konkávsága felé irányul.
Végül megkapjuk az anyagi pont gyorsulásának a természetes koordináta-rendszer tengelyeire vonatkozó vetületeit és a vektor modulusát.

 ,
(26)
,
(26)
 .
(27)
.
(27)
Képletek egy pont sebességének, gyorsulásának, a pálya görbületi sugarának, az érintőnek, a normálnak és a binormálisnak a kiszámításához a koordináták adott időfüggőségei szerint. Példa egy olyan probléma megoldására, amelyben adott egyenletek mozgás esetén meg kell határoznia a pont sebességét és gyorsulását. Meghatározzuk a pálya görbületi sugarát, az érintőt, a normált és a binormálist is.
TartalomBevezetés
Az alábbi képletek következtetései és az elmélet bemutatása az „Anyagi pont kinematikája” oldalon találhatók. Itt ennek az elméletnek a fő eredményeit alkalmazzuk egy anyagi pont mozgásának meghatározásának koordinátamódszerére.
Legyen egy rögzített téglalap alakú koordinátarendszerünk, amelynek középpontja egy fix pont. Ebben az esetben az M pont helyzetét a koordinátái (x, y, z) egyértelműen meghatározzák. A pontmozgás meghatározásának koordinátamódszere- ez egy olyan módszer, amelyben megadják a koordináták időfüggőségét. Azaz az idő három függvénye adott (háromdimenziós mozgás esetén):
Kinematikai mennyiségek meghatározása
Ismerve a koordináták időfüggőségét, automatikusan meghatározzuk az M anyagpont sugárvektorát a következő képlettel:
,
ahol egységvektorok (orthok) vannak az x, y, z tengelyek irányában.
Az idő függvényében differenciálva megtaláljuk a sebesség és a gyorsulás vetületeit a koordinátatengelyeken:
;
;
Sebesség és gyorsulás modulok:
;
.
.
Az érintőleges (tangenciális) gyorsulás a teljes gyorsulás vetülete a sebesség irányába:
.
Tangenciális (tangenciális) gyorsulás vektora:
Normál gyorsulás:
.
;
.
Egységvektor a pálya főnormálja irányában:
.
A pálya görbületi sugara:
.
Az út görbületi középpontja:
.
.
Példa a probléma megoldására
Egy pont sebességének és gyorsulásának meghatározása az adott mozgásegyenletek alapján
A megadott mozgásegyenletek alapján állapítsa meg egy pont pályájának típusát, és keresse meg az időpillanatban a pont helyzetét a pályán, sebességét, teljes, érintőleges és normál gyorsulásait, valamint a görbületi sugarát. a pályáról.
Pont mozgási egyenletek:
, cm;
, cm.
Döntés
A pálya típusának meghatározása
Az időt kizárjuk a mozgásegyenletekből. Ehhez átírjuk őket a következő formában:
;
.
Alkalmazzuk a képletet:
.
;
;
;
.
Tehát megkaptuk a pályaegyenletet:
.
Ez egy parabola egyenlete, amelynek csúcsa egy pontban és egy szimmetriatengelye van.
Amennyiben
, azután
; vagy
.
Hasonlóképpen egy megszorítást kapunk a koordinátára:
;
;
Így a pont pályája a parabola íve
,
található
és .
Pontokból parabolát építünk.
| 0 | 6 |
| 3 | 5,625 |
| 6 | 4,5 |
| kilenc | 2,625 |
| 12 | 0 |
Határozza meg a pont pozícióját az adott időpontban.
;
.
Egy pont sebességének meghatározása
Differenciálva a koordinátákat és az idő függvényében, megtaláljuk a sebességkomponenseket.
.
A megkülönböztetéshez kényelmes a trigonometriai képlet alkalmazása:
. Azután
;
.
Kiszámoljuk a sebességkomponensek értékeit az időpillanatban:
;
.
Sebesség modul:
.
Egy pont gyorsulásának meghatározása
A sebességkomponensek differenciálásával és időre vonatkoztatva megtaláljuk a pont gyorsulási összetevőit.
;
.
Számítsa ki a gyorsulási összetevők értékét időben:
;
.
Gyorsító modul:
.
A tangenciális gyorsulás a teljes gyorsulás vetülete a sebesség irányára:
.
Mivel ekkor a tangenciális gyorsulás vektora a sebességgel ellentétes irányban irányul.
Normál gyorsulás:
.
A és vektor a pálya görbületi középpontja felé irányul.
A pálya görbületi sugara:
.
A pont pályája a parabola íve
;
.
Pont sebessége: .
Pontgyorsulás: ; ; .
A pálya görbületi sugara: .
Egyéb mennyiségek meghatározása
A probléma megoldása során a következőket találtuk:
vektor és sebesség modulus:
;
;
vektor és teljes gyorsulási modulus:
;
;
érintőleges és normál gyorsulások:
;
;
a pálya görbületi sugara: .
Határozzuk meg a fennmaradó mennyiségeket.
Mértékegységvektor az útvonal érintőjének irányában:
.
Tangenciális gyorsulás vektor:
.
Normál gyorsulási vektor:
.
Egységvektor a főnormál irányában:
.
A pálya görbületi középpontjának koordinátái:
.
Vezessük be a koordinátarendszer harmadik tengelyét merőlegesen az és tengelyekre. 3D rendszerben
;
.
Mértékegységvektor binormális irányban:
.
Adottnak tekinthető egy pont mozgása a térben, ha ismerjük három derékszögű x, y, z koordinátájának változásának törvényeit az idő függvényében. Azonban bizonyos esetekben az anyagi pontok térbeli mozgása (például területeken korlátozott felületek különböző formák), a mozgásegyenletek derékszögű koordinátákban történő alkalmazása kényelmetlen, mivel túlságosan nehézkessé válnak. Ilyen esetekben választhatunk másik három független skaláris paramétert $q_1,(\ q)_2,\ \ q_3$, amelyeket görbe vonalú vagy általánosított koordinátáknak nevezünk, amelyek szintén egyedileg határozzák meg egy pont helyzetét a térben.
Az M pont sebességét görbe vonalú koordinátákban történő mozgásának megadásakor az űrlap határozza meg vektor összege koordinátatengelyekkel párhuzamos sebességkomponensek:
\[\overrightarrow(v)=\frac(d\overrightarrow(r))(dt)=\frac(\partial \overrightarrow(r))(\partial q_1)\dot(q_1)+\frac(\partial \ overrightarrow(r))(\partial q_2)\dot(q_2)+\frac(\partial \overrightarrow(r))(\partial q_3)\dot(q_3)=v_(q_1)\overline(e_1)+v_( q_2)\overline(e_2)\+v_(q_3)\overline(e_3)\]
A sebességvektor vetületei a megfelelő koordináta tengelyekre: $v_(q_i)=\overline(v\ )\cdot \overline(e_i)=H_i\dot(q_i)\ \ ,\ \ i=\overline(1 ,3)$
Itt $H_i=\left|(\left(\frac(\partial \overrightarrow(r))(\partial q_i)\right))_M\right|$ az úgynevezett paraméter i-edik együttható Lame és egyenlő az i-edik görbe vonalú koordináta mentén az adott M pontban számított pont sugárvektorának parciális deriváltjának modulusával. A $\overline(e_i)$ vektorok mindegyikének van egy iránya az iránynak megfelelő a $r_i$ sugárvektor végpontjának mozgása at i-tháltalánosított koordináta. A sebesség modulus egy merőleges görbe vonalú koordinátarendszerben a függésből számítható ki:
A fenti képletekben a deriváltak és a Lame-együtthatók értékeit az M pont aktuális helyzetére számítjuk ki a térben.
A gömbkoordináta-rendszerben egy pont koordinátái az r, $(\mathbf \varphi ),\ (\mathbf \theta )$ skaláris paraméterek, amelyeket az ábra szerint számolunk. egy.
1. ábra Sebességvektor gömbkoordinátákban
Egy pont mozgásegyenletrendszere ebben az esetben a következő:
\[\left\( \begin(array)(c) r=r(t) \\ \varphi =\varphi (t \\ \theta =\theta (t \end(tömb) \jobbra.\]
ábrán Az 1. ábra az origóból rajzolt r sugárvektort, a $(\mathbf \varphi )$ és a $(\mathbf \theta )$ szögeket, valamint a vizsgált rendszer koordinátavonalait és tengelyeit mutatja egy tetszőleges M pontban. a pálya. Látható, hogy a $((\mathbf \varphi ))$ és $((\mathbf \theta ))$ koordinátaegyenesek egy r sugarú gömb felületén fekszenek. Ez a görbe vonalú koordinátarendszer is merőleges. Derékszögű koordináták a következőképpen fejezhető ki gömbi koordinátákkal:
Ekkor a Lame együtthatók: $H_r=1;\ \ H_(\varphi )=rsin\varphi ;\ \ H_0=r$ ; a pontsebesség vetületei a gömbkoordináta-rendszer tengelyeire $v_r=\dot(r\ \ );$ $v_(\theta )=r\dot(\theta )$; $\ v_(\varphi )=r\dot(\varphi )sin\theta $, és a sebességvektor modulusa
Egy pont gyorsulása gömbi koordinátarendszerben
\[\overrightarrow(a)=a_r(\overrightarrow(e))_r+a_(\varphi )(\overrightarrow(e))_(\varphi )+a_(\theta )(\overrightarrow(e))_( \théta ),\]
egy pont gyorsulásának vetületei a gömbi koordináta-rendszer tengelyeire
\ \
Gyorsító modul $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))$
1. feladat
A pont a gömb és a henger metszésvonala mentén mozog az egyenletek szerint: r = R, $\varphi $ = kt/2, $\theta $ = kt/2 , (r, $\varphi $, $ \theta $ --- gömb alakú koordináták). Határozza meg egy pont sebességének modulusát és vetületeit a gömbi koordináta-rendszer tengelyein!
Keressük meg a sebességvektor vetületeit a gömbi koordináták tengelyeire:
Sebességmodulus $v=\sqrt(v^2_r+v^2_(\varphi )+v^2_(\theta ))=R\frac(k)(2)\sqrt((sin)^2\frac(kt )(2)+1)$
2. feladat
Az 1. feladat feltételével határozza meg a pontgyorsító modult.
Keressük meg a gyorsulásvektor vetületeit a gömbi koordináták tengelyeire:
\ \ \
Gyorsító modul $a=\sqrt(a^2_r+a^2_(\varphi )+a^2_(\theta ))=R\frac(k^2)(4)\sqrt(4+(sin)^2 \frac(kt)(2))$